牛建峰,袁胜强,,印莉敏,贡 玮
1.上海市政工程设计有限公司,2.上海市政工程设计研究总院(集团)有限公司
无人驾驶技术作为市场热点,其实际技术迭代慢于预期。目前智能驾驶技术仍处于L3级,短期内完全通过单车智能方式实现无人监管下的商业运营存在代价大、风险高等问题。东海大桥自动集卡示范测试结果显示,依靠现有单车智能技术无法充分保障安全性与有效性。因此,单车智能研发的同时,须构建完善的无人驾驶行驶环境,即车端与路侧协同配合。通过在路端构建智能化全息感知设备、智能路牌、智能信号灯等车路协同的设施能够保证单车智能对于外界数据和信息的获取,进一步提高车辆端的感知覆盖能力,避免盲区事故的发生,降低车辆接管次数。
自动集卡专用道是供自动集卡专用路权的道路,通过数字交通基础设施的建设,降低自动驾驶交通场景复杂度,提升系统运行安全与效率。目前国内自动集卡货运体系尚未开展过系统性研究与论证工作。本次针对货运自动集卡专用道进行研究,是良好把握产业与市场发展趋势,开展前瞻性研究以指导后续工作部署的需要;
是助力上海市新基建产业发展,进行初步可行性论证与项目储备的需要;
是极大提升上海疏港及物流能力,支撑上海稳步发展为卓越全球城市的需要。
随着社会经济发展及上海国际航运中心的建设,可预期未来上海市道路货运量稳步增长,而在人口红利逐步减退、成本快速增加的背景下,依靠传统劳动密集型的运输方式与手段将难以应对运输需求的稳定增长。
依据洋山港集疏运规划,公路集疏运占比将持续下降,从而保证公路运输吞吐量在东海大桥可承受范围之内,但可预见,在较长的一段时间内,公路运输仍将占洋山港集疏运的50%,总运量仍将随洋山港集装箱吞吐量的持续增长而小幅上升。统计显示,2021年洋山港公路集装箱集散总量高达1130万TEU,已接近东海大桥理论承受极限1 200万TEU,在充分保障安全的前提下,合理突破东海大桥承受极限,已成为支撑洋山港集装箱吞吐量稳定增长的重要课题,且迫在眉睫。
自动集卡作为更安全、高效、灵活的新一代运输模式,已被视为应对劳动力短缺、行驶环境恶劣、高强度连续作业等特殊情景的有效解决方案。同时,通过这一新技术的采用,可缩短车头间距、提高道路通行能力,通过调节车队组织实现“削峰填谷”,从而保证在东海大桥可承受的荷载下,实现更高的集卡集疏运吞吐量。
根据相关研究成果,由于自动集卡的反应时间可以缩小至300 ms,因此,在平均车速为80 km/h左右时,自动集卡通过缩小车头时距,可将最大服务交通量提升约20%。因此,随着自动集卡车队规模上升,不但对社会车辆的交通影响逐步减小,还可提高专用道所在车道通行能力,从而突破原有交通瓶颈,优化道路时空资源。
而对于市域乃至更广阔的范围而言,自动集卡的运用可提高道路使用效率,从而释放更多的道路时空资源,缓解资源冲突,提高社会效益。对自动集卡货运干线相关课题的研究无论对保障世界航运中心的建设,还是提升社会生活整体效率与品质,均意义重大。
在符合上海市路网及货运布局、交通和经济协调发展的前提下,重点研究通道路线选择、建设规模、断面布置、交通适应性等,使本研究的研究成果有利于提升港口公路集疏运能级,有利于发挥路网整体运行效率,有利于地区规划的开发和协调,有利于降低道路建设对生态环境和人居生活的影响。
(1)选线与集卡行驶轨迹吻合原则。在现状道路基础上进行选线,选线应与现状集卡的主要通道相符合,避免开辟新的通道,对路网造成不利影响。
(2)专用道实行时空封闭原则。专用道路段在规定时间内仅供自动集卡行驶,避免其它车辆随意进入,保障专用道通行效率,同时减少自动集卡对社会车道影响。
(3)分级分期实施原则。充分考虑可行性和必要性,近远期结合。近期尽量利用现状道路设施,不进行大规模的基础工程建设,专用道定位为测试及试运行。远期根据自动集卡车辆及物流的规模全面提升专用道标准。
参考全国各地对自动驾驶车辆道路的测试和管理规范,结合自动集卡对高速公路设施的实际需求,自动驾驶专用道的技术要点如下:
(1)支持自动驾驶的标志标线设计
目前还没有针对自动驾驶专用道的标志标线规范,本研究根据现有的道路标志标线规范来进行自动驾驶专用道的设计,在设计中沿专用车道路面和路侧设计醒目清晰的标线和标志。在自动驾驶专用道与立交枢纽入口匝道处配有醒目的准入标志标牌,对进入车辆类型、车速等进行限制,只允许符合规定的自动驾驶车辆驶入。在针对自动驾驶专用道的标志标线规范出台之前,具体的设置标准可参照已有的道路标志标线设置规范。
(2)支持自动驾驶的车路协同设施
建立自动驾驶车路协同系统,实现对自动驾驶车辆状态的协同感知,并通过车路协同路侧系统对自动驾驶车辆进行交通信息服务和对车辆进行控制。支持自动驾驶的车路协同设施建设原则如下:
①安装支持自动驾驶的传感器、监测器、路标等设备设施。
②由于自动驾驶专用车道为内侧单一车道设计,车路协同与协同感知设备布设方式采用立柱侧装方式,这样既可以覆盖专用道又可以节省成本。立柱侧装方式对应路侧立柱的安装。
③车路协同设备放置位置断面选取需要综合考虑自动驾驶专用道的位置、道路线性特点、交通流量分布、道路基础条件、危险路段区域等因素,具体原则如下:选择靠近自动驾驶专用道的路侧安装,通信范围覆盖专用道自动驾驶车辆;
尽可能选择车载终端用户量较大的路段;
选择具备路侧基础安装条件的点(有门架或立柱条件),选择供电及通信条件到位或条件易达点;
能够与高速公路上已有的其它交通信息采集设备构成数据互补体系;
兼顾道路交通安全因素,对一些重点路段、特殊路段、事故多发路段进行加密。
④根据自动驾驶车辆测试的要求,选择每0.5 km间隔建设自动驾驶车路协同路侧设备的布设方式。全路段布设约350个(见图1)。
图1 边缘感知计算系统
(3)基于位置服务的高精度定位系统
自动驾驶车辆离不开高精度精准定位和高精度GIS地图,高精度北斗定位基于北斗卫星定位系统结合CORS站实现厘米级定位,可以为基于车路协同的自动驾驶车辆提供厘米级高精度定位服务,实现车道级的车辆位置定位和监控,同时为云控平台提供基础支撑。
(4)沿专用道照明布设
对道路、路面、标志标线及前方障碍物的准确识别是自动驾驶车辆重要的功能,目前视频识别仍然是自动驾驶车辆识别外部环境的主要手段,交通环境的光照条件对视频识别的效果有相当大的影响,可以大大提高自动驾驶车辆识别的准确性。此外,一定的照明条件可以提高自动驾驶车辆行驶状态视频监控的质量。因此,为提高自动驾驶道路及标志标线识别的准确性和自动驾驶车辆的实时监控质量,需要对自动驾驶专用道沿线布设照明设施。
根据相关高速公路照明设施布设标准,采用专用道沿路段照明纵向布设间距0.03~0.05 km进行布设。可以根据自动驾驶车辆的特点设计针对自动驾驶车辆及自动驾驶行为监控应用的照明设施。
(5)沿专用道交通事件检测设备布设
目前自动驾驶车辆的性能仍然处于测试阶段,需要对自动驾驶车辆行驶过程中的驾驶轨迹、驾驶行为等进行全程交通事件检测,以便对自动驾驶的行驶状态、事故原因等进行分析。因此,需要在原有沿高速公路全路段交通事件检测的基础上,加密交通事件检测监控点,提升对自动驾驶车辆进行全覆盖的交通事件检测。
交通事件检测设备可对自动驾驶车辆及与自动驾驶相关的事件等进行实时图像监控,并能通过图像分析自动判断停车、交通拥堵、车辆排队超限、行人进入、车辆逆行、交通事故、车辆丢抛物、能见度检测等事件,及时发现自动驾驶专用道内异常事件,并提供自动驾驶相关事件处理依据。
自动驾驶视频采集设备可采用交通视频监控设备,主线路段按0.5~1 km间隔设置交通事件检测设备以监视自动驾驶专用道的车辆及交通状态,桥梁、分合流区、互通式立体交叉桥及易积水、视距不良、易发生拥堵及交通事故等重点路段应加密布设。
4.1 专用道路径选择
根据前期调研和现状集卡GPS数据分析,初步拟定两条线路作为货运自动集卡专用道备选线位(见表1)。

表1 专用道线位方案比选一览表
线路一:自洋山港至杨高北路出入口
路线自南向北依次途经东海大桥—S2(东海大桥—G1503段)—G1503(S2—杨高北路出入口),全长约102.2 km。
线路二:自洋山港至凌海路出入口
路线自南向北依次途经东海大桥—S2—S20,全长约104.6 km。
路线一(S2—G1503)为现状集卡集疏运主要路线,沿线风险点相对较少,断面规模匹配度较高,道路通行能力余量较为充足,处于城市边缘地带,与城市生活交通冲突较小,宜作为推荐方案。
4.2 车道设置
专用道设置应保证通道整体运行效率,全面梳理交通设施情况,近期打通交通瓶颈段,在主线上设置集卡专用道,需满足主线车道数≥3车道;
在匝道上设置集卡专用,需满足车道数≥2车道。远期根据交通预测需求,对沿线道路进行扩容。
本方案对自动集卡的设置车道进行比选,共有以下三种比选方案(见表2)。

表2 车道布置方案比选表



情景一:自动集卡驶出/驶入主线
采用方案一时存在以下问题:
采用方案二、方案三时不存在交织问题。
结论:如果自动集卡通过匝道驶入/驶出主线,方案二、方案三冲突点较少。
情景二:自动集卡直行穿越立交区
采用方案一时不存在交织问题。
采用方案二/方案三时存在以下问题:
结论:如果自动集卡穿越立交区时,采用方案一可有效规避进出主线的社会车辆冲突点(见图2)。
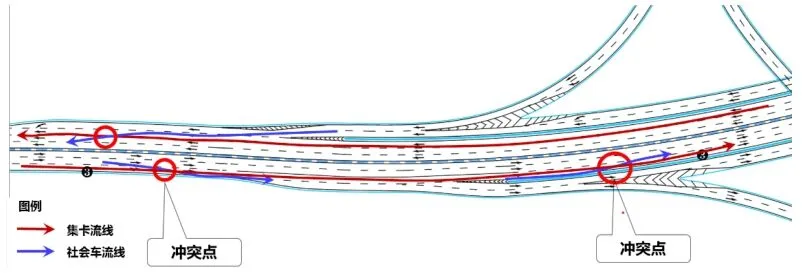
图2 自动集卡穿越立交区交通组织示意图
经比较,应结合道路出入口布置、车辆数量等情况因地制宜,灵活机动,合理设置集卡专用车道。当沿线出入口较少时,方案一较适合;
当自动集卡数量较少时,对社会车辆使用紧急停车带影响较小,方案二较合适;
当自动集卡数量足够多,且沿线自动集卡出入口也较多时,则方案三较合适。
4.3 总体布置方案
通过对路线和车道布置的比选,专用道选用东海大桥—S2公路—G1503公路。考虑到自动集卡在出入口处与社会车辆冲突点较多,建议在沿线尽量减少设置自动集卡进出口。
车道设置方案根据出入口的情况分段设置。在规划阶段尽量减少沿线设置自动集卡出入口。具体布置方案如下:
东海大桥—集疏运中心(海港立交)段采用方案三(紧急停车带);
临港收费站—G1503段采用方案三(紧急停车带);
其中,在东海大桥收费站、临港收费站、大亭立交处采用人工接管。
当自动集卡数量较少,专用道分时段封闭时,考虑本阶段自动集卡对社会车辆使用紧急停车带的影响较,布置在外侧的专用道建议采用方案二(号车道)(见图3)。

图3 自动集卡专用道布置方案—路线图
4.4 专用道分期实施
自动集卡专用道的实施应根据上海国际航运中心规划,自动集卡车辆规模,启用自动集卡装卸作业码头、堆场的数量及分布情况等因素最终确定。根据现状基础条件和未来发展的预测,拟分三步进行。第一:局部专用道规模化试运行,即东海大桥自动集卡专用道的规模化试运行;
第二:近期全线分时段专用道试运行,即在自动集卡数量不够多的前提下,洋山港至外高桥自动集卡专用道全线分时段试运行;
第三:远期全线全时段专用道运营,即远期在码头和堆场启用自动集卡规模化,自动集卡数量足够多的情况下,实现通道内自动集卡专用道全时段运行,提高通道服务水平。
(1)局部路段专用道规模化试运行
2023年建成洋山港集疏运中心及市政配套工程。根据上港集团和上汽集团的战略合作,拟逐步投入约100辆自动集卡,开展洋山港至集疏运中心的集装箱转运业务。在东海大桥洋山港—集疏运中心(海港立交)交通平峰阶段运行,设置“时段性”专用道(见图4)。

图4 东海大桥自动集卡专用道线位示意图
东海大桥登陆段通过海港立交高架连接道与集疏运中心相连,洋山港段与洋四期自动码头相连,中间段长约32.5km,中间无任何出入口。由于自动集卡数量较少,分时专用道对社会车辆使用紧急停车带的影响较小,自动集卡专用道设置在外车道可以消除进出口的交织。因此自动集卡分时专用道车道设置在号车道。
(2)近期全线分时段专用道试运行
近期2025年左右,在自动集卡数量不够多的前提下,预测可提供的自动集卡数量约500辆(含集疏运中心100辆),洋山港至外高桥自动集卡专用道全线分时段试运行;
根据专用道总体设计方案,进行全线标志标线的改建,局部主要节点包括大亭立交节点、沪崇苏立交节点通过标志标线改建实现专用道的功能,S2(G1503—东海大桥收费站)在现状道路基础上进行专用道设置(见图5、图6)。
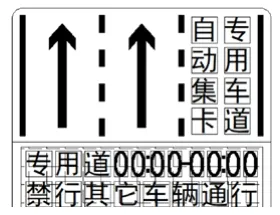
图5 自动集卡专用道指示标志
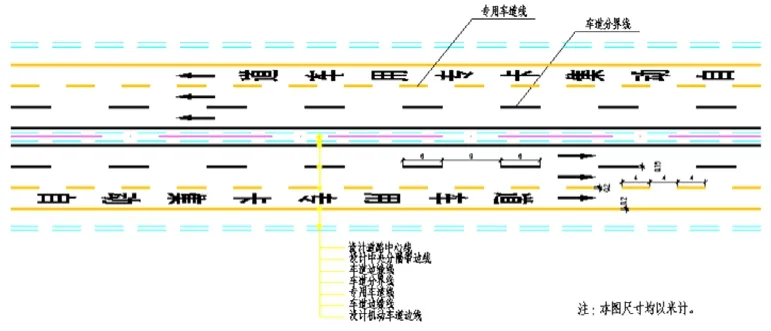
图6 自动集卡专用道指示标线
(3)远期全时段专用道运营
远期在码头和堆场启用自动集卡规模化,自动集卡数量足够多的情况下,实现洋山港—外高桥自动集卡专用道全时段运行,提高通道服务水平。通过改建主要节点包括大亭立交节点、沪崇苏立交节点和S2(G1503—东海大桥收费站),完善全场景交通数字化、关键点位路侧高频动态感知系统及车路系统管控中心平台,全面提升专用道技术等级。
同步研究外高桥—S16出省通道自动集卡专用道的可行性。
在新基建国家战略和上海国际航运中心建设背景下,本文围绕洋山港开展自动集卡专用道方案研究,确定总体原则和主要技术要求,通过系统性的现状分析,结合自动集卡、车路协同技术,聚焦洋山港—外高桥港两港间货运干线,甄别比选可行的自动集卡专用道路线,制定自动集卡专用道方案。成果对于自动集卡专用道的进一步深入研究和专用道的建设使用具有指导性和可操作性。
猜你喜欢专用道洋山港集卡浙江省嵊泗县洋山港海事局拆解涉渔“三无”船水产养殖(2020年1期)2020-12-18集卡引导系统在轨道吊自动化堆场的应用优化集装箱化(2020年7期)2020-06-20集卡预约模式下集装箱码头可变闸口协同调度优化中国航海(2019年2期)2019-07-24集卡和岸桥协同下的集装箱码头集卡路径选择天津科技(2018年12期)2019-01-02上海洋山港四期:智能码头的“中国芯”金桥(2018年4期)2018-09-26杭州市主城区公交专用道系统评估和设置标准研究浙江交通职业技术学院学报(2018年4期)2018-02-13武汉建成全国首条共享单车专用道中国自行车(2017年5期)2017-06-24基于收费软件漏洞的高速公路收费站ETC专用道砸车原因分析中国交通信息化(2017年12期)2017-06-06基于激光扫描测距技术的岸桥下集卡自动定位系统集装箱化(2016年8期)2016-10-20公交专用道:想说爱你不容易运输经理世界(2015年12期)2015-05-14