徐强辉,张佳敏,郑章荣,何绍恒,韩孟红
(广州市农业机械化技术推广站,广东 广州 510405)
2022 年,中央1 号文件提出“提升农机装备研发应用水平”[1],对未来农业机械化、智能化发展提出了更高要求。近年来,逐渐发展起来的智慧农业以智能农机装备为基础,数据和知识为核心要素,通过5G 网络、农业物联网、大数据、云计算、人工智能等现代信息技术与农业机械深度融合,实现农业生产的数字化感知、智能化控制、精准化作业[2],成为未来农业的发展方向,但在实际推广应用中发现了一些需要解决的问题。本文就智能农机装备在实际推广应用中存在的问题,从实用性、适用性、可靠性角度进行思考与探索,提出提升建议,助力智能农机装备更好运用于未来农业生产。
习近平总书记指出:“要把发展农业科技放在更加突出的位置,大力推进农业机械化、智能化,给农业现代化插上科技的翅膀”[3]。在国家政策支持引导下,国内一大批有影响力的农机企业加紧布局智慧农业发展,智能农机装备作为基础,也得到快速研发推广应用。
1.1 国内农机企业智能农机装备研制情况
国内农机企业以智能农机装备所需的智能导航、自动驾驶等关键技术为突破口,着力开展智能农机装备的技术研发。其中涉及智能导航主要应用技术有:①应用卫星导航和RTK 相位差分技术进行智能导航,配合角位移传感器对智能农机装备作业路径进行实时调整,实现数字化精准导航,带农机具进行无人作业时,作业精度可达±2.5 cm,②应用机器视觉的智能农机导航系统[4]进行智能导航,该技术除了应用卫星导航,还可通过获取导航路径上的农田成像,从中提取导航线进行田间作业路径规划,从而在复杂农田环境中进行农机装备的智能导航。涉及自动驾驶主要解决的关键技术有农机的无级变速技术及无驾驶舱农机的设计理念。首先是无极变速技术,相较于传统齿轮变速传动,无级变速技术是现代智能拖拉机的核心配套之一,能实现精细农业所要求自动驾驶、恒传动比、恒发动机转速、定速巡航[5]的技术指标,解决传统拖拉机必需人工换档变速的麻烦,助力满足智能农机所需自主变速等功能需求。其次是无驾驶舱设计理念,该理念突破了传统农机装备需驾驶舱的设计极限,创新采用无驾驶舱拖拉机的设计理念,减小拖拉机的外形尺寸,直接减少1 名农机驾驶员的工作负荷,降低人工作业成本,提高农业生产效率。
1.2 广州市智能农机装备的推广应用情况
伴随着社会的发展,请工难、用工贵等因素持续影响农业的可持续发展,智能农机装备具备智能化导航、自主化作业的功能,将有效发挥农机少人化,甚至无人化作业的优势,推动解决农业产业用工难题。为此,广州市以智能农机装备的引进示范、研发应用及推广培训为抓手,积极推动智能农机装备推广应用。
1.2.1 水稻智能农机装备的推广应用情况
近年来,广州市聚焦水稻机械化种植、烘干中心建设等技术短板,持续开展智能农机装备的引进试验示范推广工作。水稻种植方面,积极引进了水稻智能插秧机械化技术、无人飞机播种技术、智能精量穴播种技术、智能旱穴直播技术等,补齐水稻种植环节智能农机装备短板。其中,一键掉头智能辅助驾驶系统在水稻高速插秧机中得到广泛应用,该技术借助智能导航及RTK 相位差分技术与角位移传感器实时配合,实现水稻智能插秧机的数字化导航、无人驾驶、自主作业,因其作业质量高、作业轨迹笔直已成为智能农机装备应用的典型案例,如图1 所示。水稻烘干中心建设方面,广州市积极推动水稻烘干中心建设,其中广州市和稻丰公司建设的水稻智能烘干中心,实现水稻从收割到烘干、加工的全过程智能化、自动化生产,烘干、加工过程“零损失”,实现粮食颗粒归仓。

图1 水稻智能精量穴直播机和智能旱穴直播机
1.2.2 蔬菜智能农机装备的研发应用情况
广州市除了积极引进试验推广2~8 行蔬菜移栽机械外,还通过“产学研推用”深度融合机制,在总结引进蔬菜移栽机械试验经验基础上,与华南农业大学、广州绿翔机电有限公司联合改装出一款适合迟菜心移栽的全自动钵体苗蔬菜移栽机械,如图2所示,该机在PLC 和步进电机的智能控制下,带动X、Y、Z 轴进行立体精准定位,配合4 爪“仿人工”夹持器,能够实现蔬菜移栽机械的自主取投苗、自主种植,补齐蔬菜移栽环节智能农机装备的短板。

图2 蔬菜全自动钵体苗移栽机械
1.2.3 果园智能农机装备的推广应用情况
除了大规模推广技术较成熟的农用无人飞机植保技术外,还积极引进示范推广荔枝采摘机器人、除草机器人,其中荔枝采摘机器人[6],如图3 所示,运用人工智能算法,10 s 内可实现荔枝的自主识别、定位、切断及采摘,还能进行采摘路径的自主规划、自主避障。

图3 荔枝采摘机器人
为提升智能农机装备研发应用水平,广州市在积极引进智能农机装备的同时,广泛开展智能农机装备的试验示范,从试验示范中不断总结智能农机装备的优势,发现智能农机装备在大规模推广应用中存在适用性、实用性、可靠性等方面的不足。
2.1 智能农机应用存在“多与少”的落差
从目前试验推广智能农机装备的情况看,智能农机装备能够实现自动导航、无人驾驶、自主作业等功能,减少农机手劳动强度,但要实现农田智能农机装备的无人自主精准作业、安全高效智能驾驶,仍存在5G 网络信号覆盖不足、智能农机智能化程度不高等问题,导致智能农机装备型号、种类与应用条件不匹配,在推动智能农机广泛应用上存在“多与少”的落差。
2.2 智能农机应用存在“快与慢”的时间差
随着农业无人飞机、智能拖拉机、农业无人车等智能农机装备快速应用于农业现代化生产中,在智能农机装备快速应用与农业生产农艺要求需要缓慢适应中存在“快与慢”的时间差,即,农机农艺有机融合方面存在不足,缺乏成熟可复制的应用场景,影响着智能农机装备的广泛推广应用。
2.3 智能农机应用存在“增与减”的压力差
未来,农业无人机、智能拖拉机等智能农机装备将大量应用在农业生产一线,其高度智能化、自动化、高速度等特征给农业生产带来方便的同时,也存在极大安全隐患,如何下好农机管理“先手棋”,提升对智能农机装备的管理能力是眼下农机管理部门迫切需要解答的命题,智能农机不断增加的现实情况,与管理农机能力存在下行风险方面存在“增与减”的压力差。
逐步发展完善智能农机装备,提升智能农机装备的适用性、实用性、可靠性,更好发挥智能农机装备在农业生产中的作用,成为广大农机推广人员的共识。为此,本文从提升智能农机装备性能、丰富应用场景及进行智能化管理等命题入手,提出智能农机装备的提升改进思路。
3.1 探索提高智能农机的适用性
为提升智能农机装备的智能化程度,提出以下解决方案。①在农田中添加微元素,解决农田、丘陵山区5G 网络覆盖面差,影响智能农机装备正常开展作业的问题。②对智能农机进行微改造,从而提高农机装备的智能化程度,积极解决智能农机适用性不足的问题。
3.1.1 为高标农田添加微元素
目前,我市农田机械化水平稳步提升,有部分大型农业产业园区应用了智能农机装备,相对应建设了5G 网络基站,5G 拥有低延时、低功耗、高速率的特点[7],但在农田、丘陵山区5G 网络覆盖率仍较低。为此,提出在高标农田中添加5G 移动基站的方案,如图4 所示。
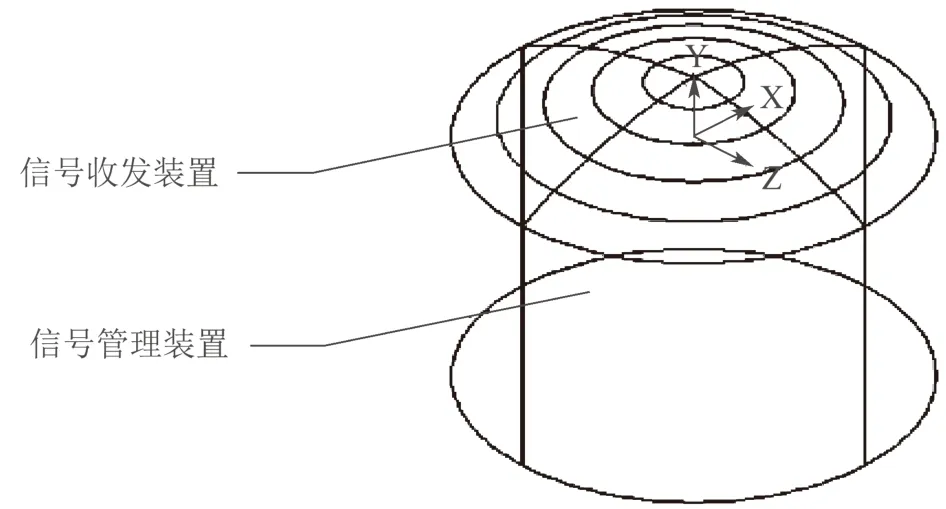
图4 5G 移动基站模型图
通过对比试验,如表1 所示。智能农机装备在5G 移动基站的辅助下,能够克服外部大棚墙壁的遮拦及高压线、高强度网络等不良因素影响,获得稳定的移动网络信号,改善智能农机装备进行智能作业所需的网络信号源,提升了5G 网络的覆盖面,提高智能农机装备的适用性。
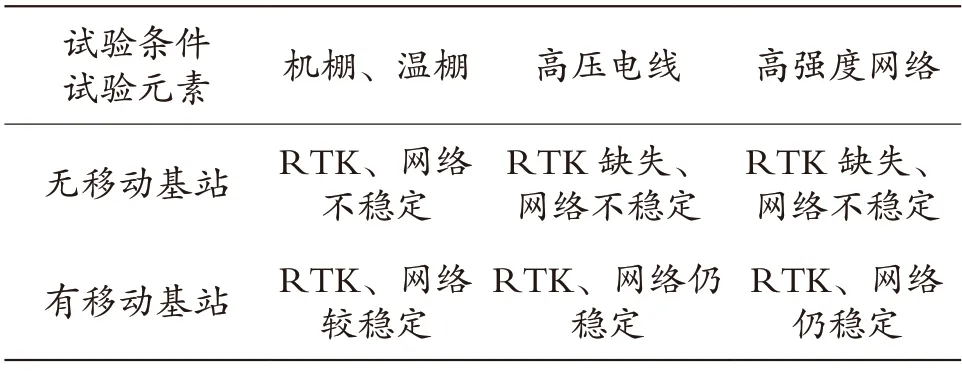
表1 不同试验元素下对网络信号的影响
3.1.2 对农机进行微改进
我市丘陵山区、农田作业条件较复杂性,极易在爬坡、下田时,在无人驾驶状态下发生翻车风险,本文从智能农机的微小处着眼探索提升农机装备的智能化程度并进行试验。
通过智能拖拉机下田爬坡试验并查阅相关资料,发现拖拉机上坡极限翻倾角为40~50°,下田极限翻倾角为52~62°[8],即拖拉机重力线超过车轮着地点时极易发生翻车风险。
为提升智能农机装备的可靠性,围绕智能拖拉机智能作业,重点进行极限重力分析,针对性尝试微改造试验,改进方案为:实时自主改变智能拖拉机的重心[9],如图5 所示,利用在智能拖拉机前置位两侧增加降温水箱及后置位两侧加装的作物洒水箱方式,通过陀螺仪组成智能拖拉机姿态传感装置,自主控制电机,形成陀螺仪+电机总成,开展前后水箱质量的自主调配,利用姿态传感装置感应车身状态,在车轮即将达到翻车极限重力点前自主启动电机抽水,把质量配置到质量较轻一侧,实现智能拖拉机质量点的自主调配,达到降低拖拉机翻车极限翻倾角,防止智能拖拉机翻车的作用。

图5 智能拖拉机重心自主调节示意图
3.2 探索提升智能农机的实用性
随着智能农机装备的快速研发应用,迫切需要收集智能农机与农艺、农时及农作物的共同特点,形成智能农机装备的使用标准,形成标准化、可复制、可推广的智能种植方案,降低智能农机应用“快与慢”的时间差。
以丝苗米智能插秧机械化技术为例,为保障智能插秧机高效有序开展无人插秧作业,通过开展多次水稻机械化育秧及智能插秧作业试验,摸清适合水稻智能插秧机开展无人插秧作业的共性指标。在多次试验中发现智能插秧机在进行无人插秧作业情况下存在农田平整度不足、智能农机抓地困难、在原地打滑等现象,影响智能插秧机高速插秧作业,需对农田进行微改造。
针对“稻菜轮作”“稻蕉轮作”地块,多次开展试验,如图6 所示,对智能插秧机发生抓地困难、原地打滑等进行水田宜机化改造,用水稻秸秆深埋平田改善水田作业条件[10]的方式,形成农机农艺有机融合方案,即,把收割完的水稻秸秆围成“一”字形或香蕉杆,在稻田平整地前,用水田秸秆深埋平田机,把水稻秸秆置于垄沟处,并用泥沙压实,进行农机农艺有机融合的试验尝试,既起到有机物填埋发酵增强土壤肥力、节本增效作用,又起到平整水田的作用,形成了一个农田实用性改造的典型案例。

图6 智能插秧机开展自主插秧试验
3.3 探索提升智能农机的可靠性
为提升对智能农机装备的智能管理能力,下好智能农机装备技术推广应用的“先手棋”。积极推动智能农机装备信息化服务平台的建设。①在重点产业园区,探索建设小型信息化服务平台,总结建设经验。②引入生产智能农机装备的重点企业,不断拓宽平台功能。
3.3.1 服务平台的微建设
为探索智能农机装备信息化服务平台的建设经验,提出在从化区丝苗米产业园开展智能农机数据管理平台的建设尝试,如图7 所示。现已开展平台的建设工作,建成后,产业园将实现对农机装备,特别是智能农机装备的智能化管理,实现农机运行与作业质量、轨迹的实时监控。

图7 智能农机数据管理平台
3.3.2 服务数据的微拓展
通过广泛调研,吸引智能农机企业进驻,积极拓展农机的实时调度、线上技术服务和维修指导等功能。最终实现建设一个信息化服务平台,利用平台上一次完成智能农机装备的线上智能管理、安全监理、技术推广、运用指导、农机作业监测和基础信息数据互联互通等功能,降低智能农机装备的管理难度、提升技术推广服务成效。
农业现代化生产,涉及的技术众多,场景繁杂,智能农机装备需要提升的地方还很多,现代信息技术与农业生产经营深度融合,需要解决“两融合”“两适应”的长期难题,未来能够解决农业生产难题的智能农机在实际推广应用中具备内生性力量。政府应从顶层规划着手引导智能农机系统化、标准化发展,在实际试验示范中制定完善的应用规划,以高端农业装备应用水平为导向,建立起广大农户与智能农机创新企业的沟通桥梁,用政策、技术实践经验引导智能农机龙头企业进行资源集成和创新,高起点推动农机智能化、智慧化发展,同时建立推动智能农机装备广泛应用的行业标准。
猜你喜欢拖拉机农机装备这些精锐与装备驰援泸定环球时报(2022-09-07)2022-09-07沃得农机四川农业与农机(2022年4期)2022-08-31港警新装备环球时报(2022-05-26)2022-05-26拖拉机内燃电传动系统一重技术(2021年5期)2022-01-18飞上天的“拖拉机”小学生学习指导(小军迷联盟)(2021年11期)2022-01-18春来好时节 农机备耕忙今日农业(2021年4期)2021-11-27防晒装备折起来小哥白尼(趣味科学)(2020年6期)2020-05-22红色拖拉机小学生必读(低年级版)(2019年3期)2019-07-08不一样的农机展中国化肥信息(2019年5期)2019-06-25红色拖拉机儿童故事画报(2018年4期)2018-05-21