陈永波 张家强 肖宇峰 张佳雯


摘 要:针对复杂环境下移动机器人可靠作业需求,结合机器人自主导航、网络测量、通信组网等技术,设计可感知作业环境通信质量的中继通信机器人,为机器人调度、任务规划提供依据。主要内容包括:设计移动中继机器人,增强作业机器人与控制台之间通信质量;
设计通信质量感知的地图构建方法,实现机器人作业环境通信质量的可视化;
设计通信中断自恢复机制,实现通信中断情况下机器人的自主返回与通信连接恢复。
关键词:移动中继;
自主导航;
通信质量感知;
通信中断自恢复
中图分类号:TP242;
TN92 文献标识码:A 文章编号:2096-4706(2023)09-0192-04
Abstract:
Aiming at the demand for reliable operation of mobile robots in complex environments, this paper combines technologies such as autonomous robot navigation, network measurement and communication networking to design relay communication robots that can perceive the communication quality of the operating environment and provide a basis for robot scheduling and mission planning. The main contents include designing a mobile relay robot to enhance the communication quality between the operating robot and the console, designing a map construction method for communication quality perception to realize the visualization of the communication quality of the robot"s operating environment, designing a self-recovery mechanism for communication interruption to realize the robot"s autonomous return and communication connection recovery in case of communication interruption.
Keywords:
mobile relay; autonomous navigation; communication quality perception; communication failure self-recovery
0 引 言
近年來,机器人的应用领域不断扩展,人们希望通过机器人来处理复杂烦琐的任务。但对于许多复杂任务,单个机器人无法独立完成,需要多个具备不同功能的机器人协调合作才可以完成任务。由于多机器人系统包括很多不同功能的机器人,整套机器人系统需要不间断地进行数据交换来确保系统的正常工作,一旦出现通信中断,整套机器人系统都将受到影响,所以保证多机器人系统的通信质量成为重中之重。
多机器人通信是建立在无线通信的基础上,国内的研究已经取得了一定的积累。浙江大学工业控制实验室提出了一种多覆盖算法,在满足不同覆盖质量的基础上考虑了多目标覆盖和区域覆盖,不过该方法只考虑理想通信环境下的解决方案;
沈阳自动化研究所针对无线网络节点控制问题,研究了网络节点的运动控制,但对无线网络节点的分布研究较少;
哈尔滨工业大学从阻塞控制和数据压缩两个角度考虑,提出了不连接分段线性和不连接分段曲线两种压缩算法,以及加权公平性和基于神经元PID控制的两种数据传输协议,极大地提高了网络传输的吞吐量。
本文针对基站信号弱和通信距离远导致中继机器人与控制台通信断开的极端情况,设计中继通信机器人来保障整个系统高质量的无线通信,实现信号质量更稳定、更可靠的作业环境,设计以下三个内容:基于全局路径规划A*算法与局部路径规划DWA算法设计移动中继机器人提供动态的网络覆盖,打破了传统的定点中继提供网络覆盖的局限性;
基于通信质量感知机制构建融合通信质量数据和位置信息的可视化地图,通过牺牲时间成本提供更直观的部署地图,为控制机器人系统提供依据;
基于路径规划与通信质量感知机制实现通信中断自恢复机制,使得中继机器人在面对通信中断的突发状况时能够自主移动到通信质量良好的区域,为多机器人系统提供高质量的无线通信环境。
1 中继通信机器人
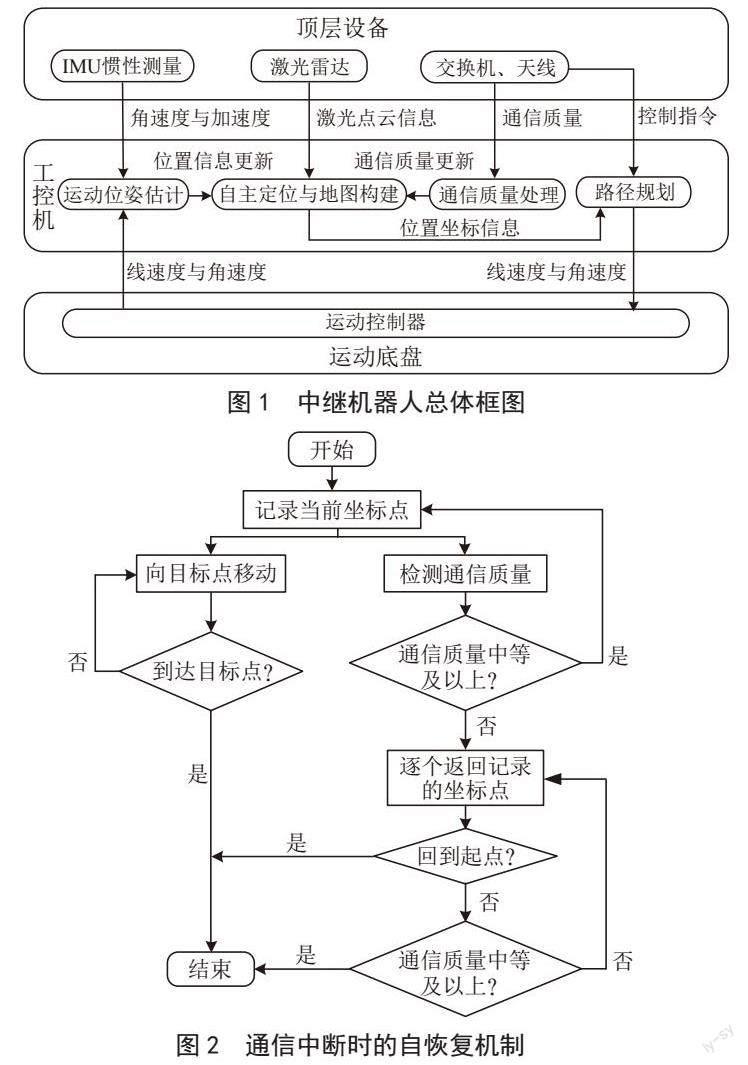
中继机器人系统由顶层设备、数据处理设备和运动底盘三部分组成。顶层设备包括IMU惯性测量设备、激光雷达建图设备和伟福特VFD5318W-MESH无线自组网设备;
数据处理设备为工控机,其操作系统为Ubuntu 18.04;
移动底盘主要由电机驱动、STM32主控板和有刷电机构成,系统总体框图如图1所示。
机器人的核心设备为工控机,具有以下功能:将IMU获取的角速度和加速度进行运动位姿估计;
采用全局路径规划A*与局部路径规划DWA结合的方法对控制指令处理实现对运动底盘的控制;
处理激光雷达扫描获取的激光点云信息进行自主定位与地图构建;
对机器人天线与控制台之间的通信质量进行监测分析,并利用此信息进行地图通信质量的更新。
1.1 路径规划
由于实际工作环境都为动态环境,使用全局路径规划算法无法实现运动环境发生局部变化情况下的自主导航,例如有行人突然出现在环境中等情况。所以本文采用全局路径规划A*算法与局部路径规划DWA算法结合的路径规划方法,实现移动中继机器人在工作环境以最优的路线移动。
ROS环境中move_base功能栈提供机器人路径规划技术的服务框架,此框架集成了全局路径规划A*算法与局部路径规划DWA算法的接口。利用此框架实现自主导航功能,首先将环境地图以/map话题名传入move_base控制器,以全局路径规划为基础计算出当前坐标点与目标点之间的运动路径。随后全局路径规划过程中激光雷达持续扫描运行环境并将扫描数据传入move_base控制器中局部路径规划接口,时刻根据动态环境信息为中继机器人提供运动速度与方向的调整,实现中继机器人在动态环境中躲避障碍物的功能。
1.2 通信质量地图构建
为实现可视化部署作业机器人和增强作业机器人与控制台通信质量的移動中继机器人,导航过程中需要得到中继机器人和控制台或者远程机器人之间的通信质量,为绘制融合通信质量的数据和中继机器人位置信息的可视化地图提供重要依据。本文采取网络嗅探机制判断中继机器人与控制台之间的通信质量,判断指标为传输延时值,并将此机制作为工控机系统中的节点。中继机器人以控制台为起点,开始运行时启动此节点,通过处理自身与控制台之间传输的数据包,得到传输过程中的延时值,判断中继机器人与控制台之间的通信质量,同时记录当前位置坐标,为建图做准备。
中继机器人移动过程中对Odom里程计模块返回的机器人坐标点信息和网络嗅探机制得到的通信质量数据进行量化分析,利用量化信息构建融合通信质量和坐标信息的可视化地图。本文将通信质量划分为三个等级:传输数据包的延时值小于500 ms为优良,地图中对应位置标记白色;
传输数据包的延时值大于500 ms但小于2 000 ms为良好,地图中对应位置标记灰色;
传输数据包的延时值大于2 000 ms为差,地图中对应位置标记黑色。
1.3 通信中断自恢复机制
为保证中继机器人在基站信号弱和通信距离远使中继机器人与控制台通信断开的极端情况下正常运行,本文设计实现通信中断自恢复机制。
通信中断自恢复机制依赖网络嗅探机制,具体流程如图2所示,中继机器人以控制台为起点,开始运行时记录下初始坐标点并启动通信质量感知节点,移动过程中时刻监测自身与控制台的通信质量。监测情况有以下两种:当监测到通信质量良好及以上时会记录此时的坐标点;
当监测到通信信号受到干扰或通信距离远导致通信质量差时会停止记录坐标点,并向上一次记录的通信质量良好及以上的坐标点移动,同时检测通信质量。如果通信质量未恢复则会继续向之前保存的坐标点逐个返回,直到通信质量恢复或回到出发点;
如果监测到通信质量达到良好及以上,中继机器人将停止并等待控制台发出控制指令,即完成了通信中断时的自恢复机制。
2 实验验证
2.1 移动中继机器人对通信质量的影响
为证明该设计可以增强作业机器人与控制台之间的通信质量,对比中继机器人加入前后作业机器人与控制台之间的传输延时值,设计以下实验流程:实验中使用伟福特VFD5318W-MESH无线自组网设备进行无线通信,其空中最高速率可达1 167 Mbit/s。总体策略如下:将作业机器人单独与控制台无线连接,通过两者之间不同的连接距离(100 m、200 m、300 m、400 m)检测作业机器人与控制台之间进行通信传输时的延时值。随后在作业机器人与控制台之间加入中继机器人,并重复上述步骤。测量多个周期数据后对所得延时值取平均值,整理得到加入中继机器人后作业机器人与控制台之间通信质量的数据,如表1所示。随着通信距离的增加,测量得到的通信质量会变差,原因在于障碍物的遮挡和空气中信号的衰减,加入中继机器人后,其传输延时值下降,通信质量有明显提高。
2.2 通信质量地图的构建
为探索该方案可以提供机器人作业可视化部署的功能即通信质量地图的构建,设计以下实验流程:测试环境是一处约200 m×80 m的户外场地,机器人如图3所示。首先机器人缓慢行进,对激光雷达和通信质量探测程序返回的数据建立如图4所示的融合通信质量的地图。图中白色代表低延时,通信质量优良;
灰色代表中等延时,通信质量良好;
黑色代表高延时,通信质量差,连接中断。实验中由于障碍物的遮挡出现了连接断开的情况,同时由于测试环境不是封闭的空间,所以在地图边缘处存在较多毛刺。实验中机器人只是环绕户外场地进行了通信质量的探测,未遍历地图的各个位置,所以只有机器人经过地方的通信质量状态。如果在实际应用中需要大范围的探测那么可以通过牺牲时间成本来遍历地图,牺牲越多的时间成本可以更加直观可靠地部署作业机器人。
2.3 通信中断时的自恢复机制
为证明该方案可实现通信中断时的自恢复,即检验通信中断后中继机器人是否可以返回到通信质量良好的坐标点并受到控制台的控制,设计以下实验流程:由于通信信号范围很广,实验中采用拔掉网线的方式来模拟通信中断的情况,如果在通信中断后中继机器人可以返回到上一个通信质量良好及以上的坐标则证明中断恢复机制可以实现;
反之,则证明未实现。中继机器人以控制台的位置为起点,以坐标点A为目标点,进行路径规划导航,全程保持通信质量良好得到导航结果如图5所示。
进一步,中继机器人重新以控制台为起点,向目标点前进,进行路径规划,当中继机器人到达坐标点B时将控制台端发射天线的网线拔掉,使得中继机器人不能接收到控制台的信号,模拟通信中断情况,此时中继机器人停止前进,不断返回之前保存的通信质量良好的坐标点,直到控制台端发射天线的网线连接恢复即通信质量恢复。
情况1:如果在此过程中通信质量恢复则中继机器人停止运动,等待控制台发出控制指令,实验中采用将网线连接恢复模拟通信质量恢复,中继机器人在通信质量良好的坐标点C停止,其运动路径结果如图6所示。
情况2:如果在此过程中通信质量一直未恢复,则中继机器人会一直返回,直到返回控制台(起点),其运动路径结果如图7所示。
由实验结果可知,当通信中断时中继机器人可以准确地返回到通信质量良好的坐标点,但返回过程中因为是逐个坐标点进行返回导致机器人运动存在一些顿挫感。
3 结 论
本文首先对全局路径规划A*算法与局部路径规划DWA算法进行研究,随后基于对通信质量感知机制的研究建立了融合通信质量与位置坐标的地图,最后基于路径规划与通信质量感知机制实现了通信中断情况下的自恢复机制。随着多机器人系统的发展,保证整套机器人系统的通信质量和为作业机器人提供可视化的部署环境愈加重要。本文移动中继机器人打破了传统定点中继提供网络覆盖的局限性,融合通信质量地图的构建为部署作业机器人提供了可视化的地图,同时通信中断的自恢复机制使得机器人可以在通信中断的突发情况下自主移动到通信质量良好的区域,有助于保障多机器人系统的无线通信环境。然而,在衡量通信质量的指标选取中,本文只采用了延时值的方法衡量通信质量情况,较为单一,后续研究中考虑加入误码率、误信率以及信道带宽等指标对通信质量进行综合衡量,以提高通信质量的有效性和可靠性。
参考文献:
[1] 王硕.多机器人系统协调协作理論与应用的研究 [D].北京:中国科学院自动化研究所,2001.
[2] 龙晓林.基于网络模型的多机器人系统研究 [D].杭州:浙江大学,2007.
[3] 郭意,唐涛.CDMA技术的原理与应用 [J].信息通信,2016(4):253.
[4] 高亚军.基于移动机器人的自主WiFi中继研究 [D].哈尔滨:哈尔滨工业大学,2016.
[5] 李国华.无线传感器网络高效数据传输方法 [D].哈尔滨:哈尔滨工业大学,2014.
[6] 张宇浩.可探测链路连通性的核辐射环境中继通信机器人研究 [D].绵阳:西南科技大学,2022.
[7] 刘银山,钟晓峰,王京.认知合作中继网络中的最优中继选择策略 [J].电信科学,2015,31(11):36-41.
[8] 蒋海芳,张四海,周武旸.基于统计信道状态信息的节能分布式中继选择 [J].应用科学学报,2012,30(3):221-226.
作者简介:陈永波(2000—),男,汉族,河北沧州人,本科在读,研究方向:机器人技术;
通讯作者:肖宇峰(1978—),男,汉族,湖南常德人,教授,博士,研究方向:智能系统。