秦建国,张旭东
(内蒙古工业大学机械工程学院,内蒙古,呼和浩特 010051)
目前,小型码垛普遍采用人工码垛方式,效率低、人工成本高、工作环境恶劣及安全生产隐患多等问题突出。本文通过设计一个码垛烘干一体机,将原来使用人工进行码垛的流程简化,减少人工的使用,实现自动化码垛过程,效率更高,可以降低产品生产的成本[1]。
码垛机构是码垛烘干机最重要的结构之一,而设计实现码垛功能时,应该充分考虑理想的码垛效果,还需要考虑托盘的尺寸规格,托盘是物流产业中最为基本的集装单元和搬运器具[2]。
1.1 设计思路
产品在托盘上堆码的方式有4 种:重叠式、交错式、纵横式和旋转式,要求托盘表面的利用率不低于80%[3]。而具体码垛的方式则要根据产品的形状尺寸选定,产品单个尺寸的长宽高为595mm×595mm×95mm,如图1 所示,设计为垂直纵向码垛,10 个产品为一垛,总高 0.95m。
常见码垛机结构有关节机器人式、桥式、龙门式等[4]。机器人码垛结构一般是多轴结构组成,适合多种尺寸规格的产品进行码垛,但每次只能进行一个码垛,且码垛的速度不快;
对于桥式、龙门式的码垛机机构,一般较少用于小型纸质产品的码垛。目前,大多数码垛装置都是针对于大尺寸、表面光滑的工件,末端采用普通吸盘或者特制的末端执行机构[5]。根据本产品的形状特点,本文设计了一种新型的纵向码垛机,可以实现逐个连续码垛。
图1 产品包装成品图
1.2 码垛机的整体结构
码垛机的整体结构如图2 所示,图中1 为导杆气缸,通过导杆的伸缩带动连接的整型板横向运动;
图中2 为整型板,在气缸的驱动下横向夹紧叠垛产品;
图中3 为整体机架,由铝型材搭配构成;
图中4 是推出平台,用于堆放码垛好的叠垛,图中5为转板装置,进行单向回转运动;
图中6 为超越离合器,保证转板装置只能单向运动;
图中7 是暖风机,通过电热提供暖风;
图中8 是空气喷嘴,将暖风机的暖风排出;
图中9 是普通气缸,在气动作用下使托盘纵向运动将单个产品依次推入转板装置中;
图中10 是托盘;
图中11 是无杆气缸,可以实现纵向运动,带动连接的推出板,将码垛完成的产品整垛推出;
图中12 为推出板,进行纵向运动,将码垛好的产品推出码垛机;
图中13 是直线导杆,其上的滑块与推出板相连,进行横向进给运动。
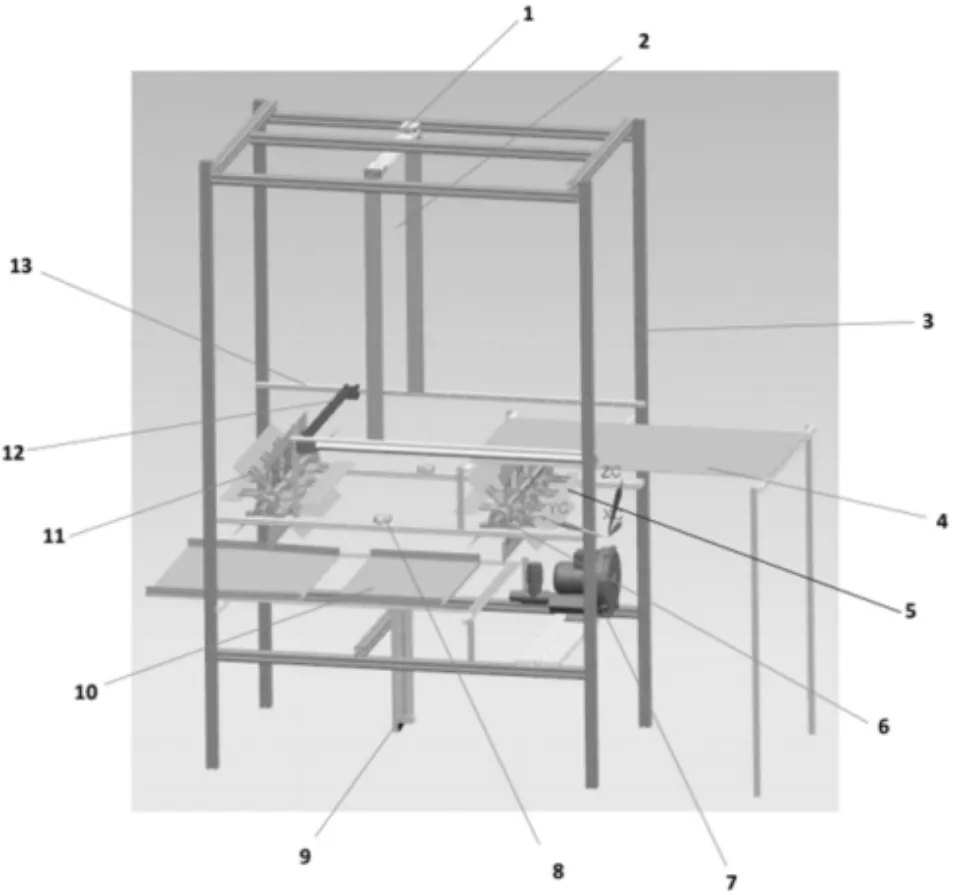
图2 码垛机主要结构图
1.3 码垛机的工作流程
(1)普通气缸开始向上运动,所连接的托盘以及托盘上的产品向上运动。
(2)上升中的产品上表面与转板的下表面相接触时,驱使转板向两侧旋转,当普通气缸的上行行程结束后,此时产品接触的挡板旋转达到45°位置,产品与挡板不再接触,此时产品下表面与挡板上表面接触。
(3)普通气缸开始下降行程,回到原始位置,由于转板只能单向旋转,此时产品在与托盘不相互接触时也会在转板上保持静止,不发生掉落,从而完成一次码垛的运动。
(4)在码垛同时,暖风机开始工作,将产生的暖风经过空气喷嘴输出,对纸盒烘干。
(5)经过若干次的码垛后,产品叠垛到达预先设计高度,此时整型装置的导杆气缸带动整型板进行纵向运动,对叠垛进行整齐,整齐后气缸回到初始位置。
(6)挺多无杆气缸连接的推出板将整齐后的叠垛沿推出平台推出,推出后,无杆气缸回到初始位置,完成一次完整的码垛烘干过程。
2.1 转板结构原理
超越离合器具有改变速度、防止逆转、间歇运动的特点[6]。本设计的创新之处在于针对产品的特性设计了一种新型的转板结构,通过转板结构和单向超越离合器的功能可以实现纵向对产品的码垛。
2.2 推出装置原理
推出装置主要由无杆气缸带动推板,沿直线导轨进行往复运动,依靠摩擦力将整个产品的叠垛推出。本设计为2s 完成一次往复,通过无杆气缸上的行程开关设置相应的行程,为了保证在推出过程中叠垛不发生倒塌,需要对推出装置的运动特性进行分析。
3.1 转板结构的设计及有限元分析
因为转板承受一定的载荷,因此有必要对转板进行结构分析,确定转板的材料结构是否能到达到设计的标准,我们采用UG 中的有限元模块,对转板的主要受力结构长支撑板进行有限元分析。分析结果如图3 所示:

图3 转板静态受力变形图
3.2 有限元分析结论
由于转板是左右对称结构,我们对一侧的转板进行力的载荷的施加,施加载荷为60N,方向为竖直向下,在螺栓连接处施加固定约束,最大形变集中在支撑板连接处,约为0.077mm,整体变形非常微小,可以认为长支撑板的结构符合设计要求。
3.3 耐久性分析
转板在工作时,所承受的最大载荷也成周期性变化,每个周期T 是码垛一次完成的时间。
安全系数合理选择原则是:在安全可靠的情况下,尽可能选择较小的安全系数。根据经验数据法选取安全系数,如果材料性能数据可靠,载荷和应力计算准确,可取[S]=1.23~1.3[7],确定安全系数为1.3。对于塑性材料,当其达到屈服而发生显著的塑性变形时,即丧失了正常的工作能力,所以通常取屈服极限作为极限应力;支撑板材料使用塑性材料,在进行耐久性分析时,设置使用屈服极限。
综上所述,给有限元模型指派材料为Iron_40,周期T=60s,安全系数确定为1.3,设定循环的次数为100000 次,基于以上参数我们进行耐久性的分析。

图4 疲劳安全系数结果图

图5 疲劳失效指数结果图
3.4 耐久性分析结论
根据分析结果,强度安全系数最小为103.66,最大为232676,云图的分布情况为,右边缘处的强度先降低,其他位置的强度降低较小;
疲劳安全系数最小为167.479,最大为1088270,云图分布情况显示,支撑板不会发生疲劳失效;
疲劳失效指数最小为 4.29782×10-6,最大为 0.00946437,根据判断标准,强度安全系数大于1,表明支撑板的强度满足要求,疲劳失效指数小于1,表明支撑板在划分的有限元单元中,不会有单元出现疲劳损坏的情况,说明支撑板的结构设计以及材料选择达到设计目的。
3.5 叠垛的运动仿真
叠垛在被推出时,最下层的产品被推出板推动带动整体叠垛推出,推出时的行程由两段组成,第一段,底层产品与作为支撑的产品相互接触,此时两者的动摩擦系数为0.2,在二段,底层产品与推出平台相接触,此时两者的动摩擦系数为0.12,可以得出,第一段所受的摩擦力最大,底层产品与上层产品分离的趋势也越大,简化模型得,若在第一段情况下,整体叠垛不发生相对位移,就可以保证叠垛在推出过程中不倒塌。

图6 叠垛各产品位移叠加图

图7 叠垛各产品速度叠加图
在仿真模型中,叠垛中的各个产品可设置为带摩擦的滑动副,而最底层的产品可视为主动件,需要添加驱动函数,利用step 函数时间设定为1.3 秒,行程设定为1000mm,最终求解得到以上曲线图。
3.6 运动仿真结论
为了直观地判断叠垛中的各个产品是否发生相对位移,将叠垛中的十个产品的运动曲线图叠加,叠垛中的其他产品与底层产品的运动曲线相一致,说明叠垛在运动中,在同一时刻具有相同的运动特性,表明叠垛在推出过程中不会发生倾倒。
本文所述的码垛烘干机构,通过设计的转板装置,可以实现产品逐层自动码垛,相比人工码垛,码垛机可以快速完成产品码垛,大大提高企业的生产效率,转板码垛结构更适合产品的特殊形状,造价更低,并通过有限元分析仿真等手段,验证了设计的合理性和可靠性。
猜你喜欢转板码垛安全系数用于条状再生橡胶片自动码垛装置橡塑技术与装备(2022年11期)2022-11-08基于RobotStudio的码垛机器人工作站仿真设计*南方农机(2022年20期)2022-10-20基于Morgenstern-Price法考虑桩作用力的支护力计算方法安徽工程大学学报(2022年2期)2022-05-11袋装物料自动码垛拆垛的功能实现与设计现代制造技术与装备(2022年1期)2022-02-21考虑材料性能分散性的航空发动机结构安全系数确定方法航空发动机(2021年1期)2021-05-22基于ABB 机器人工作站的码垛工艺设计科学技术创新(2021年13期)2021-05-16直接转板上市尽显新三板之无奈证券市场红周刊(2019年41期)2019-11-02关于电梯悬挂钢丝绳安全系数计算的一些探讨中国科技纵横(2015年23期)2015-11-22接近物体感测库显著提升安全系数汽车零部件(2014年6期)2014-09-20