宋春伟, 何金龙, 李刚
(中国计量大学现代科技学院,浙江 义乌 322000)
采用传统脉宽调制策略,同一桥臂上下两功率开关器件的驱动信号相位互差180°。由于功率开关器件存在开通与关断延时,为了避免桥臂出现直通现象,同一桥臂上下开关管的驱动信号需要添加死区时间[1-2]。死区时间的引入会导致桥臂实际输出电压波形偏离给定参考基波电压,进而引起桥臂输出电流波形存在畸变[3-6]。另外,随着开关管功率等级的增大,它的开通、关断时间越大,则加入死区时间也越长,因此采用加入死区时间的PWM算法不利于电力电子变换器容量的进一步扩大。
为了避免死区引起的问题,很多死区补偿方法相继被提出。文献[7-10]中所提出死区补偿方案的缺陷在于高度依赖精确的数学模型。文献[11-14]通过调整门级驱动信号达到补偿输出电压畸变的目的,但额外的电流检测电路增加了硬件的复杂度。文献[15-16]中提出的基于电流脉动预测的补偿方案能够消除死区引起的共模电压,但补偿算法较复杂。死区补偿方案无法从根本上彻底解决死区引起的问题,并且补偿效果会随着输出电流变小或开关频率升高而进一步恶化,因此有必要对死区消除PWM加以研究。文献[17-18]提出的死区消除SPWM方案需通过开关管反并联二极管电压判断输出电流极性,但开关噪声与电流脉动容易造成极性判断错误。文献[19-20]针对死区问题提出了混合PWM方案,在非输出电流过零点附近采用死区消除SPWM,而在输出电流过零点附近仍旧采用死区补偿PWM方案。文献[21-22]分别将死区消除SPWM应用于共直流母线逆变器并联系统与并网逆变器并联系统。文献[23]将死区消除SVPWM应用于六半桥3相电压源型逆变器,并且将提出的调制策略与常规SVPWM对比后发现死区消除SVPWM能够更好地降低输出电压波形的畸变以及谐波含量。文献[21-23]中提出的这些死区消除PWM的共同缺陷在于H桥中4个功率开关管在各工频周期内开关次数不均衡,这对系统可靠性带来不利影响。
本文基于H桥拓扑提出了用于各开关周期内的新型开关模式,改变同一桥臂上下开关管互补导通的传统工作方式。利用新型开关模式的特点,提出了3H桥开关次数均衡死区消除SVPWM方案,实验结果表明了所提出PWM方案的特点与有效性。
3H桥电压源型逆变器驱动开绕组感应电机如图1所示,图中H桥X(X=A,B,C)结构如图2所示。

图1 3H桥电压源型逆变器驱动开绕组感应电机Fig.1 3H bridge voltage source inverter with open-end winding induction motor

图2 H桥X(X=A,B,C)拓扑结构Fig.2 Topology structure of H bridgeX(X=A,B,C)
对于H桥X(X=A,B,C)输出PWM电压ux1x2中存在0,+E与-E三种电平。如表1所示,根据调制波umx极性以及实际输出电流极性,一个开关周期内存在4种情况,每种情况下含有2种开关模式。以情况1为例,期望输出电平为+E或0,输出电流为正,以下2种开关模式可供选择。
开关模式1:
开关管SX2、SX3驱动信号保持低电平,开关管SX4在当前开关周期内始终导通。当开关管SX1开通,则ux1x2输出电平为+E。相反,当开关管SX1关断,电流经续流二极管DX2、开关管SX4与定子绕组形成回路,则ux1x2输出电平为0。
开关模式2:
开关管SX2、SX3驱动信号保持低电平,开关管SX1在当前开关周期内始终导通。当开关管SX4开通,则ux1x2输出电平为+E。相反,当开关管SX4关断,电流经续流二极管DX3、开关管SX1与定子绕组形成回路,则ux1x2输出电平为0。

表1 一个开关周期内的开关模式
图2为针对H桥拓扑传统SVPWM策略。如图3所示,信号SX与H桥X(X=A,B,C)输出电压ux1x2在每个开关周期内的占空比保持一致。将SVPWM调制波umx分成两份,分别对半桥LX1与LX2作上下开关管驱动信号互补的双极性调制,获得不加入死区时间的信号Px1、Px2、Px3与Px4,最后取信号Px1与Px3做异或逻辑运算后获得信号SX(X=A,B,C)。

图3 信号SX的产生过程Fig.3 Generation process of SX
由于负载为开绕组感应电机,根据调制波与输出电流的关系,如图4所示将一个工频周期分成4个区域,图中UPN_X为调制波umx的极性,IPN_X为H桥X(X=A,B,C)输出电流的极性。UPN_X与IPN_X构成二维变量PNx,其取值如下式:
(1)
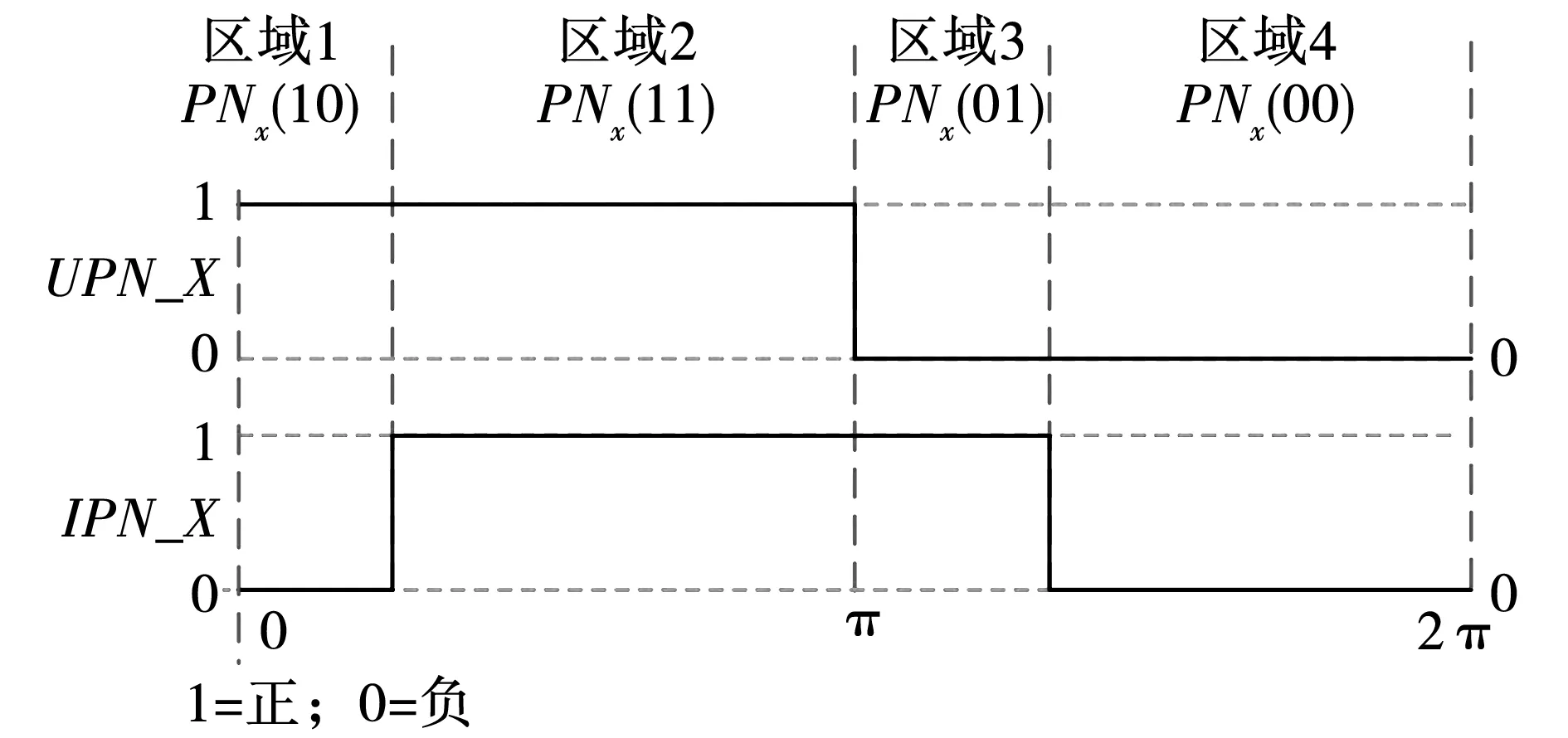
图4 umx极性与输出电流iX极性的关系Fig.4 Relationship between direction of iX and polarity of umx
基于表1中提出的开关模式,在每个区域内H桥X(X=A,B,C)中4个全控开关管可供选择的工作状态如表2所示。以图4中区域1为例,开关管可按表1中情况2选择开关模式,同时保证在一个工频周期内所选择的开关模式相同。并且,为了能够实现H桥4个全控开关管能在整个运行时间内开关次数均衡,在2个相邻工频周期内采用的开关模式不同。

表2 每个区域内开关管工作状态Table 2 Work statuses of the switches in each region
为了保证采用所提出的调制方案其每个开关周期内平均电压与采用传统双极性SVPWM时保持一致,当选择开关模式1时,各高频工作开关管驱动信号为
(2)

(3)
式中,Qx3与Qx4分别为开关管SX3与SX4的驱动信号。
根据上述分析,死区消除SVPWM方案如图5所示。从图5中可以发现,当桥臂处于高频工作状态下,在任一个开关周期内桥臂中始终存在一个开关管驱动信号为低电平,因此在开关周期内无需为桥臂设置死区时间。另外,对于工频工作桥臂,在一个完整的工频周期内始终存在一个开关管的驱动信号是低电平,因此在单独的开关周期内也无需设置死区时间。
从图5可以发现,在H桥X输出电流极性变化时刻,比如在t1、t2、t3与t4时刻,桥臂LX1与桥臂LX2有可能需要设置一个死区时间来防止桥臂与直流母线发生直通故障。下面针对电流过零处死区问题作分析。

图5 死区消除SVPWM方案Fig.5 Dead-time elimination SVPWM
3.1 天然死区时间
对于高频工作桥臂,在电流过零点之后的一个开关时间内,以电流过零点为起点,脉冲波形SX在此起点之后所持续的低电平时间为天然死区时间。在电流过零点之后的第一个开关周期中,某一桥臂输出的瞬时PWM电压如图6所示,在此开关周期内输出平均电压可表示为:
(4)
式中:TL为低电平持续时间;
Ts为开关周期。由式(4)可得从此开关周期的起始时刻开始,低电平持续的时间为
(5)

图6 某一桥臂在一个开关周期内输出的PWM电压波形Fig.6 Output PWM voltage waveform of a leg in one switching period
H桥X输出电压由两个桥臂的输出电压ux1与ux2的差值构成,在电流过零处的开关周期中所能提供给高频工作桥臂中上下两个开关管的天然死区时间为
(6)

(7)
式中Um为桥臂参考电压幅值。由式(6)、式(7)可得,天然死区时间为
(8)
(9)
由式(6)、式(9)可得,天然死区时间为
(10)
另外,对于工频工作桥臂,在电流过零处天然死区时间其值等于H桥输出电流滞后输出电压的时间,具体为
(11)
式中f为桥臂参考电压基波频率。
3.2 电流过零点死区问题解决方案
若天然死区时间比所需的最小死区时间大则电流过零处不必为桥臂设置额外的死区时间,反之则额外的死区时间是需要的。由式(8)、式(10)、式(11)可知,天然死区时间与开绕组感应电机功率因素、参考电压幅值等因素有关,在电流过零点是否设置死区时间具有不确定性。若3H桥逆变器每次运行前先判断在电流过零处是否需要设置死区时间,这样不仅会增加逆变器工作的复杂度,还会使得提出的死区消除SVPWM的通用性大大降低。为了解决死区消除SVPWM方案在电流过零处的死区问题,可借助硬件电路在任意时刻预先设置一个合理的死区时间。
图7为电压脉冲信号上升沿延时电路原理图,由死区消除SVPWM方案获得的各路PWM信号Qxi(x=A,B,C;i=1,2,3,4)经图7后输出各开关管最终的驱动信号Rxi。上升沿延时时间即为驱动信号中预置的硬件死区时间Td,具体为
(12)
式中:U为Qxi中高电平电压值;
UT为与门阈值电压。
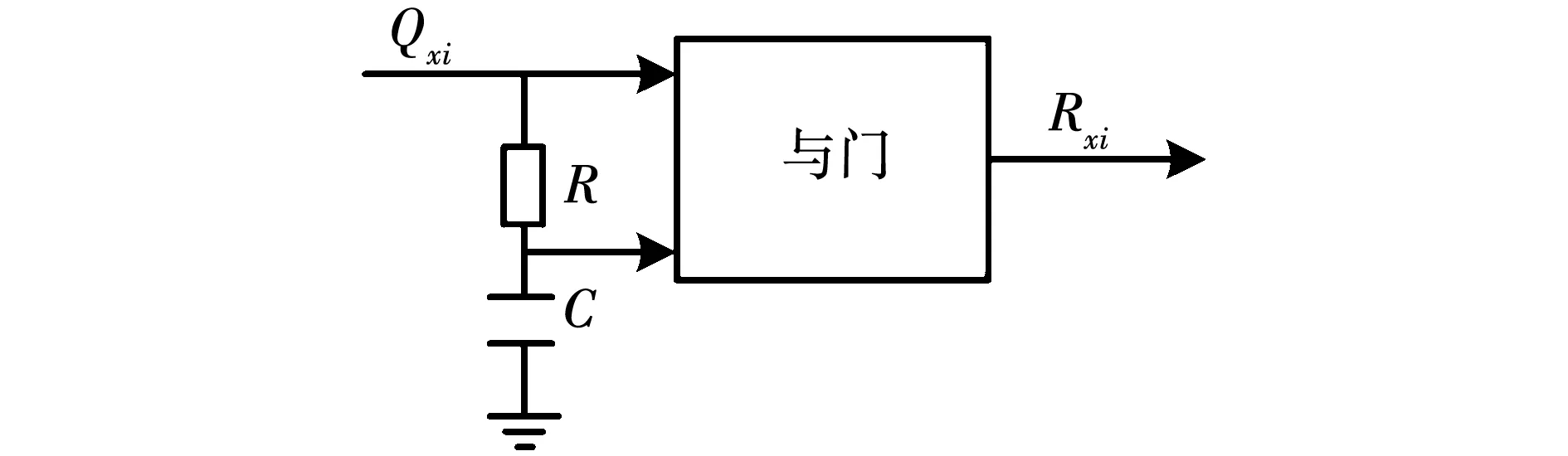
图7 电压脉冲信号上升沿延时电路Fig.7 Delay circuit for the rising edge of voltage pulse signal
图8中的实验结果验证了设置硬件死区时间的有效性。图8(a)中PWM_in1与PWM_in2本身具有的死区时间小于2.5 μs的硬件死区,两个信号经上升沿延时电路后,输出的两个信号PWM_out1与PWM_out2中所具有的死区时间拉长到2.5 μs。图8(b)中PWM_in1与PWM_in2本身具有的死区时间长度大于2.5 μs的硬件死区,两个信号经上升沿延时电路后,输出的两个信号PWM_out1与PWM_out2中具有的死区时间不发生变化与原输入信号的死区时间长度相同。由图8可知,硬件死区的设置保证了桥臂上下开关管两个驱动信号之间的死区时间至少为硬件死区。

图8 验证设置硬件死区时间的有效性Fig.8 Verifying feasibility of setting hardware dead-time

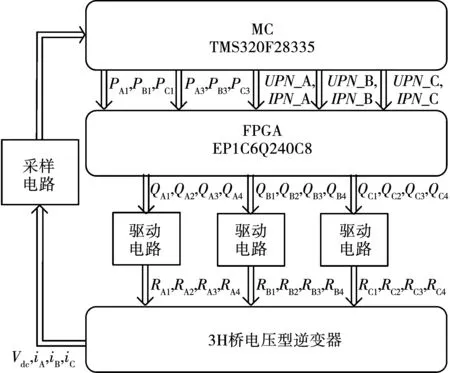
图9 3H桥逆变器系统硬件结构图Fig.9 Hardware structure diagram of 3H bridge inverter system
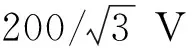

图10 H桥A输出PWM电压Fig.10 Output PWM voltage of H bridge
表3为在不同情况下A相输出电压基波幅值,可以发现相比本文提出的死区消除SVPWM,采用带死区时间的SVPWM时,输出电压基波分量存在明显误差,并且随着死区时间的增大,基波电压幅值损失越严重。

表3 在不同情况下A相输出电压基波幅值
图11为H桥A四个开关管驱动信号,可以发现,开关管SA1与SA2每间隔10 ms后持续高频工作10 ms,而开关管SA3与SA4在每个工频周期内总的高频工作时间也为10 ms,因而开关损耗在四个开关管内均匀分布。桥臂LA1或者桥臂LA2在每个工频工作的20 ms周期内,上下开关管的驱动信号存在大约2.2 ms的天然死区时间。
图11 H桥A四个开关管驱动信号Fig.11 Gate control signals for switches SAi(i=1,2,3,4)


图12 开关管SA1、SA2、SA3、SA4驱动信号与信号SA的关系Fig.12 Relationship between SA and gate control signals for SA1, SA2, SA3 and SA4
本文针对H桥拓扑提出的两种开关模式,能够确保在任意开关周期内避免桥臂上下开关管驱动信号间设置死区时间。在保证H桥输出平均电压正确的前提下,相邻两个工频周期内采用不同的开关模式,获得了开关次数均衡性死区消除SVPWM。
本文揭示了提出的调制方案在H桥输出电流过零处存在的天然死区时间,并提出可采用硬件死区避免在线判断电流过零处额外死区时间设置的必要性。由实验结果可以看出,由 MCU与FPGA相结合的控制系统能够很好地实现提出的死区消除调制方案。值得注意的是,若从装置成本的角度考虑,本文中FPGA执行的任务可由价格低廉的数字逻辑芯片完成。
猜你喜欢死区桥臂低电平具有输入死区的分数阶Victor-Carmen 系统的有限时间同步(英)工程数学学报(2020年6期)2021-01-09桥臂病变的临床病因学研究进展中风与神经疾病杂志(2021年10期)2021-01-032017款凯迪拉克2.8L/3.0L/3.2L/3.6L车型低电平参考电压总线电路图汽车维修技师(2018年7期)2018-12-07零电压开关移相全桥的死区时间计算与分析通信电源技术(2018年3期)2018-06-26桥臂梗死的临床分析中国实用神经疾病杂志(2018年9期)2018-05-25输油站进站压力控制方案优化科技创新与应用(2017年1期)2017-05-11浅谈物理电路与数字电路电子技术与软件工程(2017年2期)2017-03-15含有死区与间隙电动舵机的反演控制航空兵器(2016年5期)2016-12-10一种三电平NPC逆变器四桥臂故障容错拓扑工矿自动化(2016年10期)2016-10-2815-MeV电子直线加速器的低电平系统核技术(2016年3期)2016-04-19