杨 勇,柯 炎
(国能陈家港发电有限公司,江苏盐城 224600)
我国当前面临不小的控煤压力,为解决煤电存量过大、产能过剩及部分产能落后等问题,国家自“十三五”至“十四五”期间,陆续颁布实施了一系列针对性政策,加速淘汰污染重、能耗高的落后老小火电机组,提高存量设备利用率,同时大力推进高参数、大容量机组的技术研发与应用,以持续深化供给侧结构性改革,推进煤电高效节能发展。
大量消纳清洁能源,随之而来的调峰压力主要落在煤电机组上,这要求机组在大范围变工况的运行状态下,快速适应电网负荷需求的改变,同时必须将主蒸汽压力、过再热汽温、烟囱入口NOx浓度等主要参数维持在合理范围内,以保证机组安全稳定、高效经济、环保清洁地运行。深度调峰背景下,电网自动发电控制对燃煤发电机组机炉协调控制提出了更高要求[1-2]。
火电机组协调控制系统在实际运行时,有如下共性问题:目前多数电厂的机炉协调控制系统基于常规PID 设计,在实际机组深度调峰工况下存在负荷调节速率低、调节精度差、主蒸汽压力温度波动幅度大等问题,无法满足AGC 及一次调频性能考核要求[3-4]。为此,文章基于预测控制技术设计研究深度调峰工况下先进AGC 协调优化控制系统。
陈家港电厂1 号机组在50%至40%深度调峰过程中,存在主汽压力偏差较大、主汽温度波动大、整体协调稳定性差等问题,常通过手动调节来达到深度调峰。
从广义上来说,预测控制以自适应控制为起源,主要是针对离散系统而提出来的一种概念[5]。GPC 的计算步骤如下。
广义预测控制基于状态空间模型,其结构形式见式(1):

其中,y为协调控制系统输出被调量;
u为协调控制系统输入控制量;
x为状态变量;
k为采样时刻;
A、B、C分别为系统矩阵。
将式(1)的状态空间模型转化成增量型扩展状态空间模型[6],也就是说,把输出方程并入状态方程,形成式(2):
为简化方程,将式(2)转换为式(3):

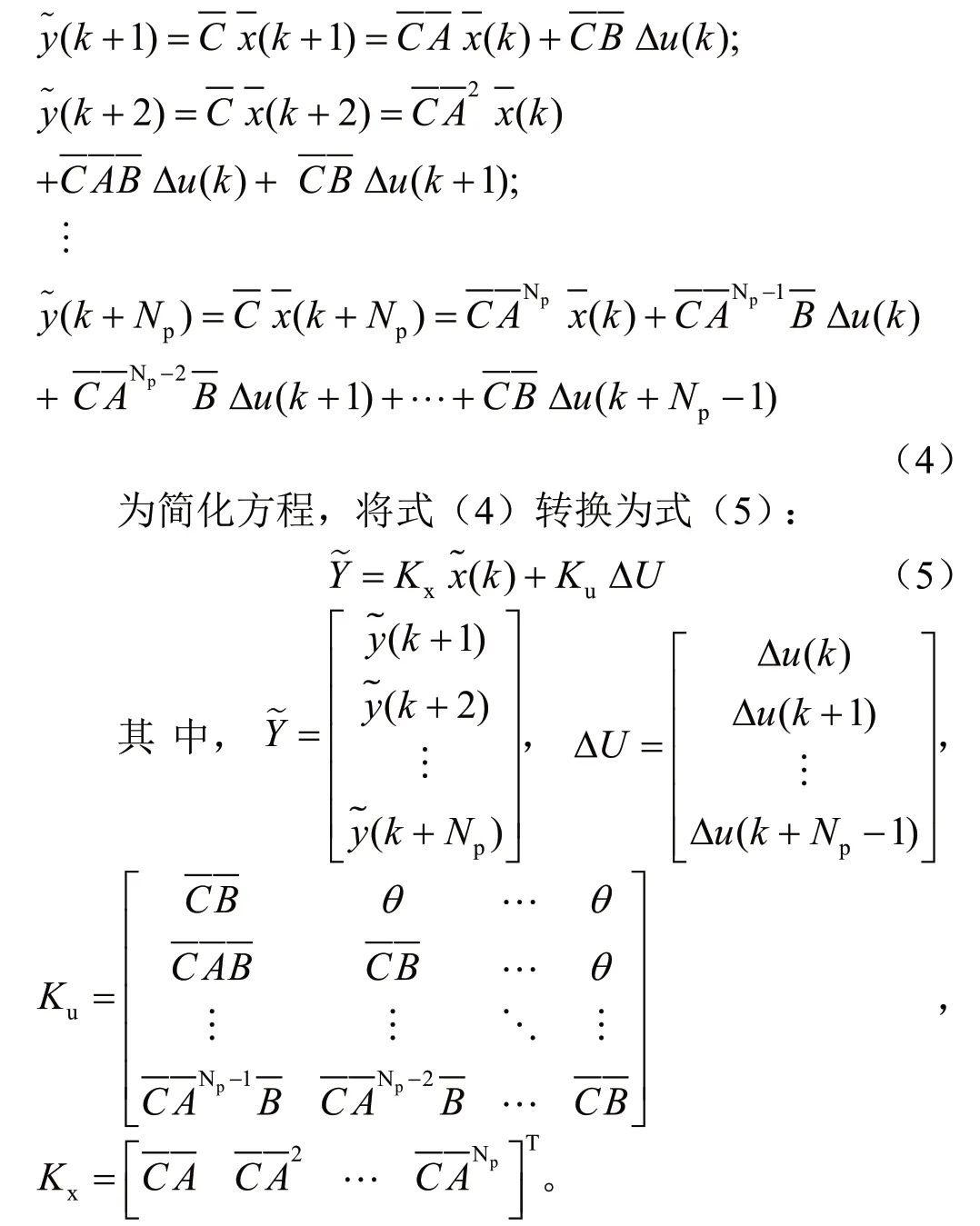
将式(3)作为预测模型,对系统未来Np步输出进行预测,可得输出预测方程,见式(4)。

预测控制选择滚动优化方法对最优控制量进行计算,文章以二次型函数为控制系统性能指标,具体公式见式(7):

遵循最小二乘法则,能够获得的控制规律见式(8):

取前Nc项代表最优控制增量Δu(k),而Nc则表示控制步长。
从根本上说,预算控制器输出计算以最小化性能指标J为基础,从而获得最优控制量序列,即u(k),u(k+1),…u(k+Nc-1),使得预测模型输出预测和设定值w(t+j)相近,只在实际控制中用到u(k),后续展开重复计算,即可达到滚动优化目的。
前馈+反馈控制模式用于协调控制系统控制结构中,依照机组现阶段的AGC 指令、电网频率以及实发功率等参数对调度EMS 系统中的AGC 指令变化趋势进行实时预测。同时,依照机组风量、燃料量以及给水流量等相关参数,对锅炉在未来时刻的热功率信号变化值进行实时预测,同时根据两者匹配程度对锅炉指令变化量加以修正。系统结构如图1所示。
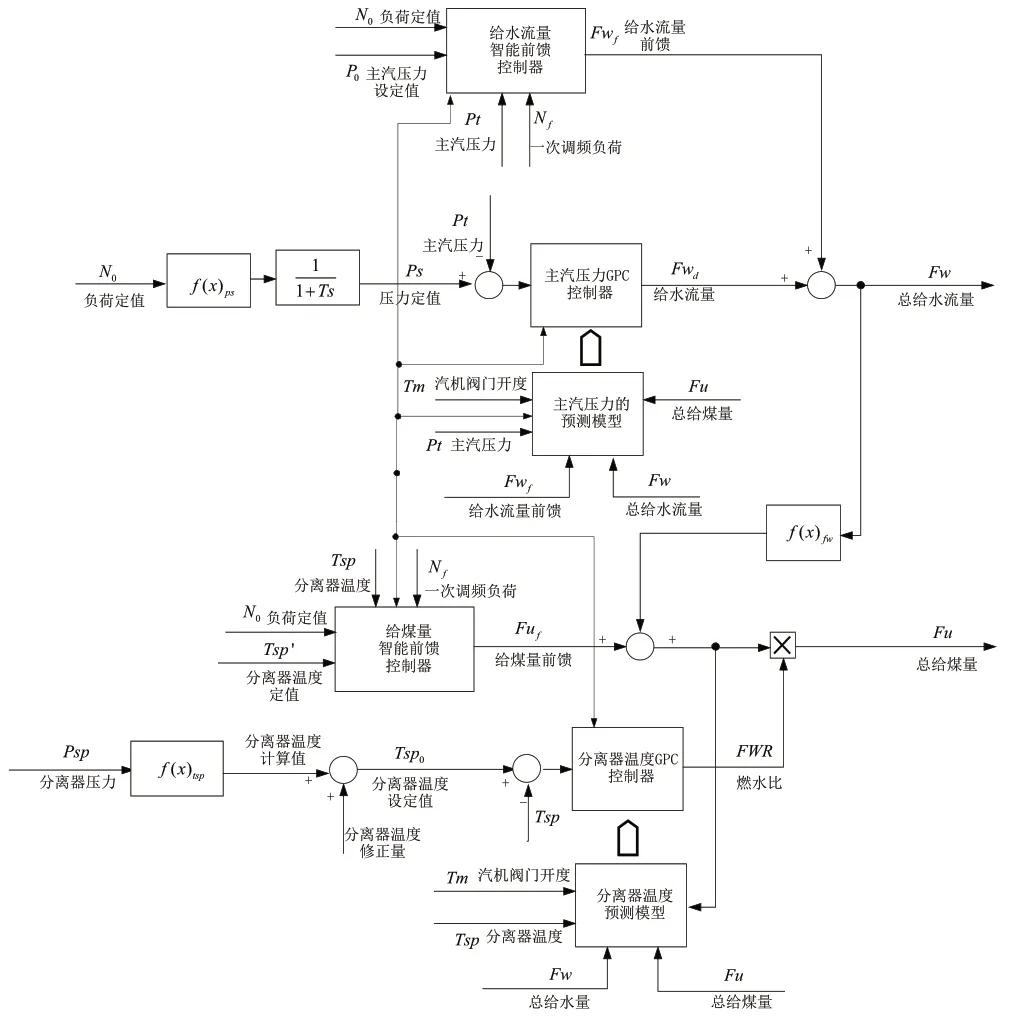
图1 先进AGC协调控制系统结构
如图1所示,先进AGC 协调控制系统在反馈回路应用了预测控制技术,前馈部分则采用了智能前馈控制策略。通过预测控制算法对汽温、主汽压力等被调量的变化趋势进行提前预测,并依照被调量变化趋势展开控制,以实现机组AGC 控制系统抗扰动能力与闭环稳定性的大幅提升。调节原理如下。
系统根据机组运行参数,动态拟合“机组负荷——燃料量、给水流量”的函数关系;
根据机组负荷指令,计算基本燃料量指令、给水流量指令的静态值;
根据主汽压力偏差,按照预测控制方法计算料量指令、给水流量指令的动态压力调整值;
根据中间点温度、主汽温度的偏差,决定燃料、给水调节温度的权重系数。基本原则是:在汽温偏差不大时,基本通过改变燃料量来调节汽温,而在汽温偏差较大时,则通过快速调节给水量来稳定汽温;
根据中间点温度、主汽温度偏差和燃料、给水调节温度的权重系数,按照预测控制方法计算料量指令、给水流量指令的动态温度调整值;
将燃料、给水的静态值、动态压力调整值、动态温度调整值相加,得出最终的燃料指令和给水流量指令。
根据上述控制规律,可以得出机组在一些典型工况下的燃料、给水指令的变化规律。
升负荷时(降负荷为逆过程):燃料、给水同时增加,并由于制粉系统的大滞后特点,燃料需要有较大的过调量来弥补燃、水响应的时间差。因此在升负荷时,燃料量增加的速率和幅度均会快于给水流量;
机组压力偏高、温度偏高时:燃料快速减少,给水将适当减少或不变。
机组压力偏高、温度偏低时:燃料适当减少或不变,给水快速降低;
运行人员降低中间点温度控制器设定值时:燃料适当降低,给水先快速增加,再在实际汽温开始下降时逐步减少。
3.1 锅炉主控变负荷前馈优化
负荷变动情况下,因汽车响应速度比较快,所以锅炉燃烧具有滞后性与延时性。该情况下,机组锅炉主控内安装前馈,从而组合为静态前馈、动态前馈。静态前馈为负荷对应锅炉指令折线函数,动态前馈通常会引入变负荷速率、负荷偏差等。动态前馈在负荷变动过程中的变化与燃料指令区间变化相对应。低负荷状态下的减负荷变动作用在于,预防动态前馈减燃料量少所导致给煤量指标较少的情况,否则会对燃料稳定产生影响。
3.2 滑压曲线优化
在给水主路全开状态下,给水母管与主汽之间的压力差越大,那么给水流量就会随之增大。所以,汽动给水泵为保证具有相同给水流量,在主汽压力降低的情况下,就会影响到给水泵的转速,导致给水母管压力的下降,而维持给水母管和主汽压力的差值,能够为既定给水量提供保障。给水流量公式见式(9):

其中,K表示流量系数;
Q表示给水流量;
∆P表示差压;
ρ表示给水密度。
在机组负荷临界35%负荷的情况下,机组主汽压力值大约是11.8 MPa,而在减负荷期间会有超调情况出现,主汽压力实际数值为10.6 MPa,小汽机最低转速为3008 r/min,为避免小汽机转速在3000 r/min以下,跳出自动与遥控,同时对低负荷主汽压力设定值进行适当抬高。图2中的压力设定1为原设计滑压曲线,压力设定2为优化后的滑压曲线。

图2 滑压曲线
低负荷主汽压力设定值适当提升,就需要提高给水母管的压力,并实现小汽轮机出力的加大,对小汽轮机运转速度予以适时提升。然而,必须注意汽动给水泵的流量设定最小值,防止汽动给水泵因出口流量过小,造成跳闸的情况。
针对国能陈家港电厂#1机组在深度调峰工况下存在的问题,设计了深度调峰工况下基于预测控制技术的先进AGC 协调优化控制系统,在#1机组的实际投用效果表明该系统可以平稳地将机组负荷降至最低目标负荷,且变负荷过程中机组汽温、汽压等主要参数的动态偏差均在正常的范围内,达到了机组深度调峰的初步预期目标。
猜你喜欢汽温主汽水流量枯水期前婆桥村生态沟渠水体的污染指标削减状况研究江苏广播电视报·新教育(2022年1期)2022-05-15M701F4燃气轮机TCA系统冷却水流量异常分析青海电力(2022年1期)2022-03-18超临界火电机组滑压运行优化与节能性分析黑龙江电力(2022年6期)2022-02-01凤电4号机组高负荷主汽压力波动大原因及调节手段科学与财富(2021年13期)2021-07-04基于重力方向影响的低压涡轮叶片水流量测量数值计算航空发动机(2020年1期)2020-06-13浅谈600MW火电厂锅炉汽温调整商品与质量(2018年46期)2018-12-08灵活性改造抽汽口的选择商品与质量(2018年42期)2018-04-22主汽压力影响因素分析及解决方案自动化博览(2016年7期)2016-09-07330MW机组主蒸汽流量计量不准的原因分析及措施综合智慧能源(2015年1期)2015-06-05电站锅炉汽温的调控分析科学中国人(2015年26期)2015-03-12