王浩炎 王玉玫 高瑞明
(中国电子科技集团第十五研究所 北京 100000)
面对日趋复杂的战场空间态势[1],在跟踪、连续探测、数据处理等方面,传统的单雷达部署模式存在一定不足,在单雷达部署情况下,经常会出现探测覆盖不全面、预警不及时、跟踪目标丢失等情况。为满足雷达对全方位战场空间的覆盖探测要求,可将不同极化方式、工作方式、适用频段的雷达进行组网布站,形成全面覆盖范围大的情报覆盖网[2],在中心控制系统统一管控下,每个雷达最优化发挥各自功效,协同运作最优化,针对任务区域保障,保障对区域内目标的探测、定位及跟踪。
雷达组网具有单雷达部署难以实现的突出性能[3]:(1) 雷达信息情报资源在组网内共享,使得信息情报资源的可靠性在实际雷达保障任务中显著增强;(2) 组网雷达中各个雷达威力覆盖相互重叠,目标检测效率相对单雷达获得显著提升;(3) 不同的雷达从不同角度探测跟踪目标,抗隐身能力提升;(4) 扩大组网雷达系统在不同任务空间域的威力覆盖效能。
雷达组网布站模式已经成为世界各国雷达研究发展的一个重大主旋律,并已经普遍地使用于海空天等行业中[4-7]。但是在实际雷达区域保障任务中,如果雷达组网系统对各个雷达以及整个系统管控调度方法不当,就会出现雷达组网针对区域保障任务出现差错、数据处理速度慢、造成大量的资源浪费等问题。面对瞬息万变的战场态势和日益复杂的环境,针对任务区域保障对雷达网中多部雷达同时使用时,雷达资源的合理利用是必不可少的,因此如何利用雷达体系中有限的资源,尽可能高效快速进行雷达组网管控优化布站已经变成一个必要的研究方向。
本文主要研究针对任务区域保障的雷达组网部署管控优化算法。文献[8-9]分别以探测空域范围为目标函数和以目标定位能力作为重要指标建立雷达布站模型,但都是单指标约束的雷达组网布站模型。文献[10-11]则考虑多种指标约束条件下的组网布站,但在进行实际筹划模拟软件应用时针对雷达组网优化布站这一非线性优化问题存在算法“早熟”、运行时间缓慢,甚至出现稳定性差的问题,文献[12-14]中针对雷达组网优化部署使用遗传算法,可以很好地规避以上出现的问题,但是传统遗传算法自身仍存在收敛迭代次数过多,出现局部最优等问题。本文在遗传算法基础上引入免疫算法[15],并针对传统遗传算法和免疫遗传算法在实际应用中进行一定的改进,进行仿真验证算法的可行性,使本文算法在具有更大的雷达组网威力探测空间效能情况下运行时间代价更小,使其可以应用于实际雷达相关工程项目应用软件生成最优雷达优化部署方案。
1.1 雷达组网优化部署原则
雷达组网优化部署最终目的是提升雷达组网在有限资源获取更大的探测区域且在任务区域雷达探测范围内目标检测概率尽可能获得提升,实现雷达组网的无缝、连续覆盖。有以下几个原则需要满足[16]:
(1) 明确雷达数量和各个雷达参数以及性能后,优化部署雷达组网,使得雷达组网满足雷达任务覆盖需求,并尽量获取最大的责任区探测面积。
(2) 针对区域任务所需保障的监测区域,在任务区域重点防护方位以及高度层必须存在一定冗余。
(3) 为了雷达组网内雷达因为两两距离太近导致电磁波信号频率相近发生干扰,需要注意雷达组网中存在交叉频率范围的雷达与雷达需存在一定空间距离。
(4) 对于同一任务区域,雷达部署数量需适当或者开机雷达数量需要适当,防止资源浪费。
(5) 保证重点检测的任务区域可以被雷达威力完全覆盖到并存在冗余覆盖面积。
1.2 数学建模
雷达组网系统主要职责是对任务区域进行保障,起到预警探测的作用,如何合理管控和优化组网雷达来提升雷达组网系统针对目标的识别率以及在有限资源获取更大的探测区域是研究的主要目的。明确雷达部署地形态势以及雷达组网部署雷达数量、类型以后,基于构建的雷达组网优化部署原则,确立目标函数,建立数学模型,目标函数值就是雷达组网可以实现的雷达威力探测最大空间效能的量化数值。
在任务区域保障中雷达组网威力覆盖区域按照重要程度分为两种,分别是普通警戒区和核心探测区,其中普通警戒区重要程度低,核心探测区相对更重要。设普通警戒区为Ag,核心探测区为Ac,Ac和Ag关系为Ac⊂Ag。设雷达组网由N部雷达组成,雷达组网中雷达数量和各个雷达型号已知,普通警戒区域面积G和核心探测区域面积C很难同时实现最大化,因此需要探索两者存在的平衡关系。建立目标函数量化雷达组网威力探测最大空间效能,对其优化求解,得到雷达组网最优管控部署方案。目标函数为:
其中:
式中:Gi是雷达组网在高度层i的威力普通警戒区域面积;Ci是雷达组网在高度层i的威力核心探测区域面积;Aji是雷达j在高度层i实际威力覆盖面积;λ是核心探测区域探测目标的等级,依据目标重要程度设置被保障的任务目标受威胁等级;雷达威力在不同的高度层也不一样,设有M个高度层,ωj(j=1,2,…,M)是雷达威力受不同高度层的影响程度。
在本文设雷达组网针对任务区域保障的任务区域中普通警戒区域是长宽都为100 km的正方形,核心探测区域是在任务区域中心的长宽20 km的正方形。
遗传算法是由美国Holland教授提出的基于进化论和遗传学说的一种随机、高并发、自适应搜索算法,其适用于传统搜索方法无法解决的非线性、复杂的搜索问题[17]。针对本文构建的雷达组网优化部署目标函数这一全局随机优化问题,遗传算法对比传统搜索算法如枚举法、专家推理法等具有避免组合爆炸、搜索效率高等优点。基于目标函数搜索信息,形成初始种群,选择、交叉、变异产生新种群,迭代循环,满足中止条件结束。传统遗传算法流程如图1所示。

图1 传统遗传算法流程
(1) 染色体编码。对于组网雷达的优化部署问题,使用二进制编码。设雷达组网拥有N部雷达,染色体就是每部雷达地理坐标,Lx、Ly位二进制编码表示每部雷达横纵坐标,一种可行的雷达部署方案就对应L=N(Lx+Ly)位编码。拥有N部雷达的染色体为:
任何雷达组网类型都是由三部雷达部署组成雷达组网情况下发展而来,这里为方便验证算法可行性在算法仿真阶段重点对三部已知参数的雷达组成的雷达组网进行仿真实验,验证算法的可行性和优越性,在获取到三部雷达组网部署最优化方案以后,可拓展到具有更多数量雷达的雷达组网管控,应用于实际雷达区域演练保障考核任务中。
获取三部雷达组成的雷达组网中各雷达的横纵坐标作为染色体,三部雷达分别设为a、b、c,a雷达横纵坐标分别是ax、ay,同理,b、c雷达横纵坐标分别是bx、by和cx、cy,单个染色体为:
axaybxbycxcy
(1)
普通警戒区域是长宽100 km的矩形,其转换到直角坐标系,a、b、c三部雷达横纵坐标范围为[0,100]。16位二进制字符串编码成单部雷达坐标,编码方式为:
编码的精度如下:
式中:a、b形成值域区间,字符串的长度是m,等于16。a是0,b是100,单位为km,可知编码精度为0.001 53 km,满足要求。
(2) 适应度函数。这里适应度函数值就是目标函数值,即f,且函数值为正,适应度函数值和组网雷达威力探测空间效能成正比。设雷达组网威力探测在M=4个典型高度层发挥作用,每个高度层对雷达威力影响程度是ω1=ω2=ω3=ω4=0.25,在核心探测区域,目标等级λ=0.1,在高度层1组网雷达威力范围半径是20、20、20 km,高度层2则是30、25、30 km,高度层3是40、35、40 km;高度层4是20、30、45 km。根据战场态势变化f中的参数值可不断改变对组网雷达部署优化进行调整。
(3) 初始种群。种群的规模会对算法优化结果和执行效率产生关键影响,需选择合适的种群规模,这里选择种群规模为100。
(4) 选择。这里利用适应度比例方法选择种群中个体进行迭代。
(5) 交叉。使用单点交叉方法,这里选择0.6作为交叉概率。
(6) 变异。采用基本位变异方式,这里选择0.001作为变异概率。
(7) 算法中止条件和解码。设置算法最大迭代数为300,多次实验表明在300代内已经可以收敛,得到雷达优化布站的结果最优。迭代300代以后,需对个体进行解码,得到最优个体每部雷达横纵坐标值。雷达横纵坐标解码公式为:
式中:Radar表示某部雷达的横坐标或纵坐标;Umin表示坐标范围内最小值,也就是0;k为16;bi为0或1;σ为编码的精度。
(8) 遗传算法仿真结果与分析。设种群大小为100,每个个体由三部雷达的横纵坐标组成,每个坐标由16位0/1字符串构成,个体长度为96;设交叉概率为0.6,变异概率为0.001。仿真30次,分别求出每次仿真的平均和最优的适应度函数值以及每次实验的收敛代数。
仿真30次的平均和最优的适应度函数值数据分布如图2所示,迭代次数数据分布如图3所示。
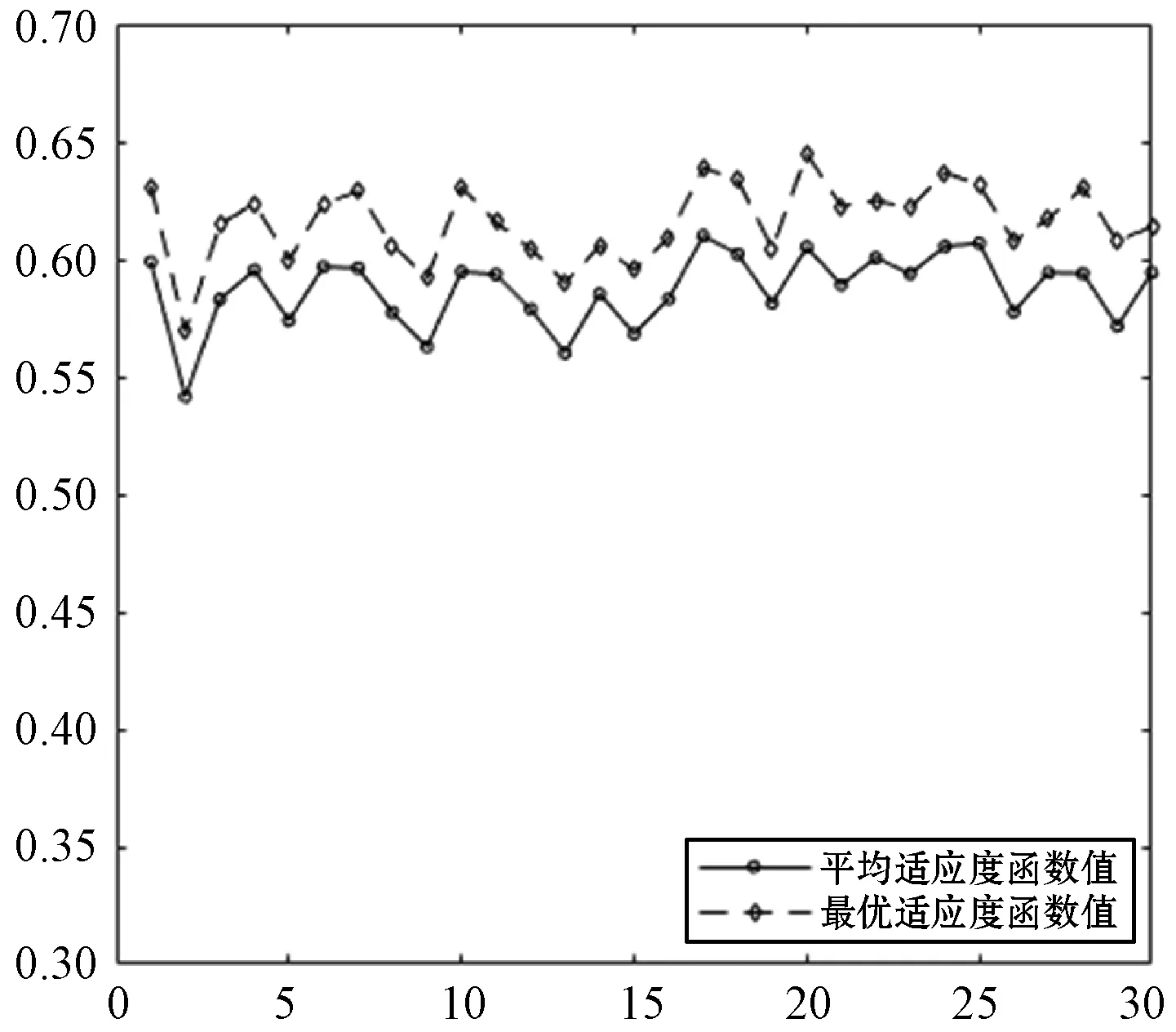
图2 遗传算法适应度函数值数据分布
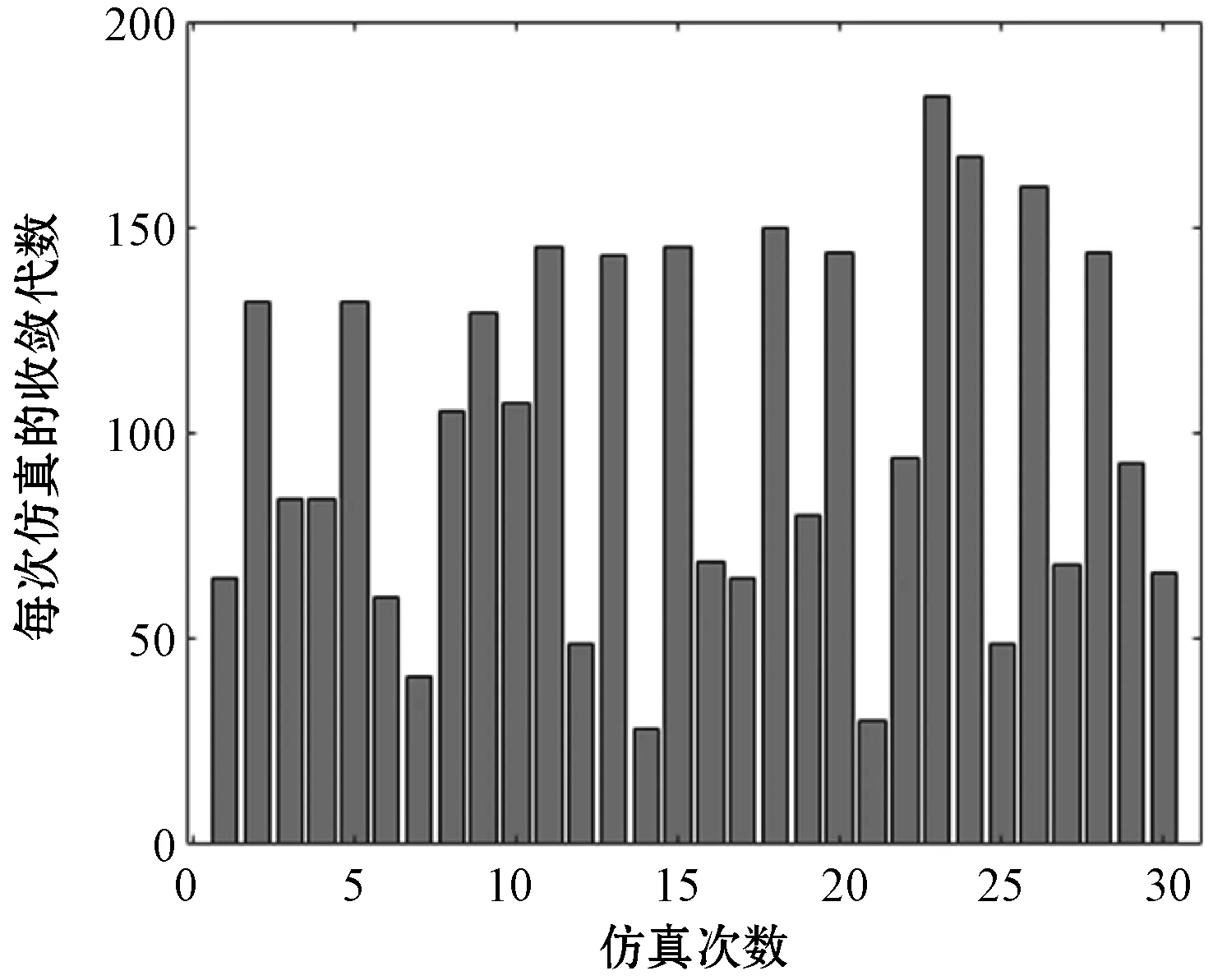
图3 遗传算法收敛代数数据分布
针对30次仿真实验进行求均值分析,得到仿真30次平均适应度函数值平均为0.587 1,平均适应度函数值最小是0.541 5,最大为0.609 9,与平均值的差值是7.767 0%和3.883 5%;最佳适应度函数值的平均是0.615 8,最小值0.569 2,最大值0.644 8,与平均值的差距为7.567 4%、4.709 3%;收敛代数平均为100.333 3,收敛代数最小和最大是28、182。算法仿真30次的结果可看出每次仿真结果都不一样,说明传统遗传算法结果不稳定、收敛速度慢且有早熟等问题。
另外雷达组网实际优化部署时,最优化的雷达组网部署方案利用遗传算法只一次运行是不可能得到的,且运行程序时间代价太大,无法真正落实工程项目,为满足时间代价小、程序一次运行就能得到最优化组网部署方案等需求,需对传统遗传算法做出改进。
3.1 免疫遗传算法
前面实验可知传统遗传算法存在早熟、结果不稳定、收敛速度慢、难以运用到实际部署组网雷达中等缺点,因此需对遗传算法做出改进,由免疫理论[18]和遗传算法各自优点结合成的免疫遗传算法[15],具有避免传统遗传算法中早熟、局部收敛等问题,可以很好平衡种群多样性与收敛性,提高算法求解速度。免疫遗传算法过程如下:
(1) 明确抗原。算法中待求问题就是抗原,这里就是获得组网雷达优化部署的最优方案。
(2) 初始抗体的产生。生成抗体的方法与传统遗传算法方法一样使用二进制编码,设染色体长度是96、抗体数是120、记忆库容量是20。
(3) 亲和度。抗原与抗体间匹配程度即抗体识别抗原能力,计算抗体的适应度函数值来得到。
(4) 抗体浓度。抗体间相似度,使用矢量矩计算方式[19]。设xi为单个抗体解码求的值,抗体适应度函数值是f(xi),集合X由数量为N的抗体组成,f(xi)在X集合距离为:
抗体浓度是:
抗体选择概率公式如下:
(2)
由式(2)可知,抗体i被选中概率与X里与i矢量矩近似的抗体数成反比,可以保持抗体种群的多样性。
(5) 繁殖概率。由亲和度和抗体浓度可得繁殖概率,抗体的繁殖概率与其适应度函数值成正比,与抗体浓度成反比,避免出现局部解的状况。设亲和度是A,抗体浓度是C,抗体繁殖概率如下:
式中:λ是多样性评估参数,设其为0.95。
(6) 分化记忆细胞。记忆库的更新采用选择繁殖概率较大的抗体的方式。
(7) 更新抗体。选择、交叉和变异更新种群(没有记忆库抗体),选择利用适应度比例选择的方法,设变异概率是0.001,交叉概率是0.6。
(8) 新种群由原种群加入记忆库中的抗体形成。算法流程如图4所示。

图4 免疫遗传算法操作步骤
仿真30次分别求出每次实验的平均和最佳适应度函数值,以及每次实验的收敛代数。图5为仿真30次的平均和最佳适应度函数值分布。图6为仿真30次每次实验适应度函数收敛时的迭代数值。

图5 免疫遗传算法适应度函数值数据分布

图6 免疫遗传算法收敛代数数据分布
对仿真30次的实验结果求均值进行分析,30次平均收敛代数为23.666 7,最小是9,最大为53。仿真30次平均适应度函数值平均为0.621 0,最小0.577 2,最大0.636 0,它们分别与平均值相差7.053 1%和2.415 5%,与传统遗传算法仿真结果的对比如表1所示;实验获取的最佳适应度函数值30次仿真平均是0.650 0,最小为0.599 4,最大为0.669 6,两者与平均值的差距相差7.784 6%、3.015 4%,与传统遗传算法仿真结果的对比如表2所示。

表1 传统遗传算法与免疫遗传算法平均适应度函数值比较

表2 传统遗传算法与免疫遗传算法最佳适应度函数值比较
根据表1和表2能够得出,免疫遗传算法相对于传统遗传算法收敛代数明显小了很多,也就是说算法收敛快,时间代价变少,另外从最佳适应度函数值可以看出免疫遗传算法最佳适应度函数明显变大,代表雷达组网威力探测最大空间效能得到明显提升。
3.2 免疫遗传算法的改进
免疫遗传算法希望维持种群多样性的情况下得到与抗原亲和度高的抗体,然而存在与抗原亲和度高的抗体在种群中浓度大,这样不能确保可以保存这样的与抗原亲和度高的抗体。因此需要对免疫遗传算法进行一定改进,与抗原亲和度大小从小到大有序排列抗体,取出在前1/20排列的个体,这些个体不被允许进行记忆细胞分化和抗体更新操作,这样确保亲和度高的抗体保存下来的概率,保证种群的多样性。
图7为仿真30次的平均和最佳适应度函数值分布。图8为仿真30次每次实验适应度函数收敛时的迭代次数数值。

图7 一次改进免疫遗传算法适应度函数值数据分布
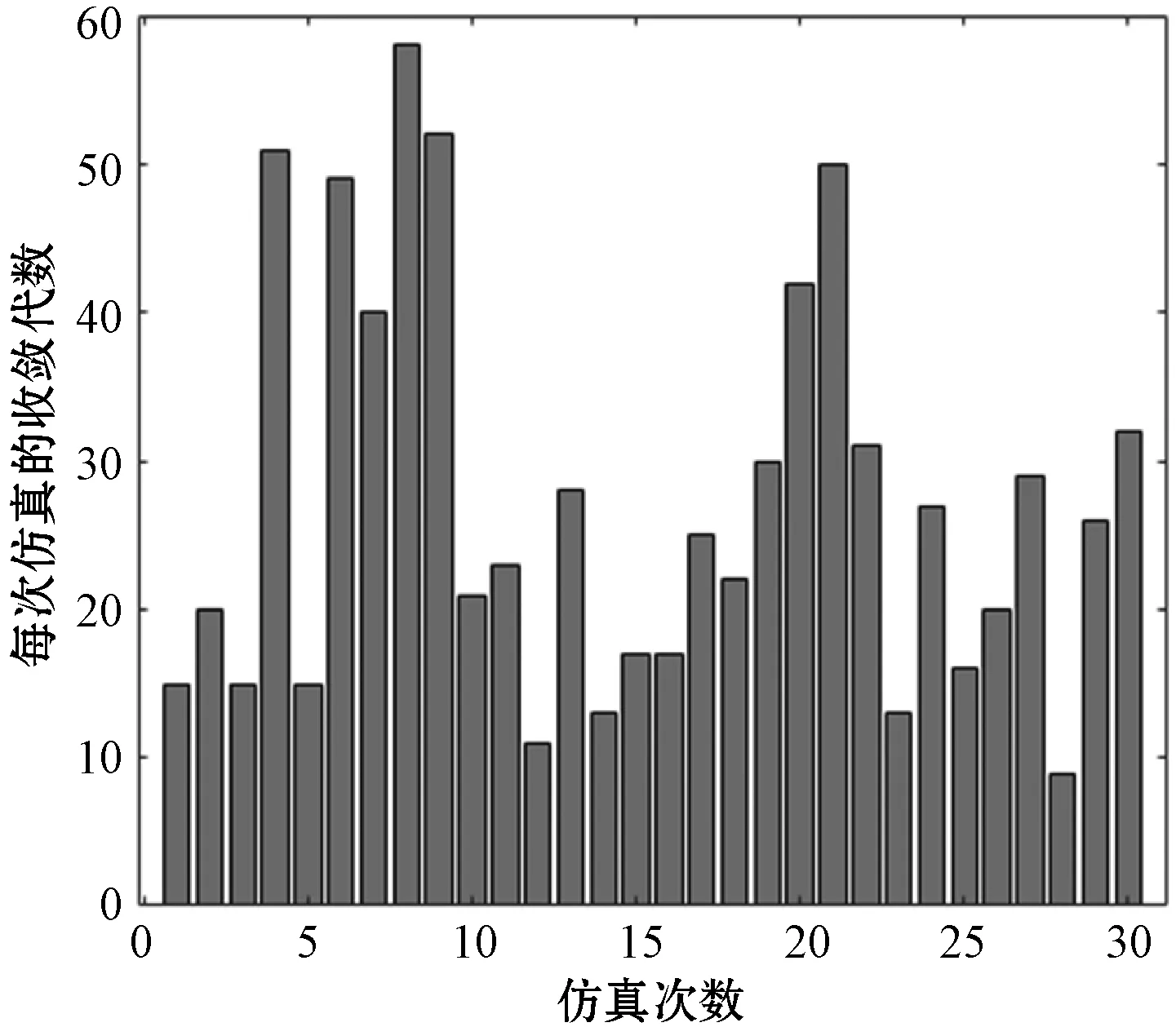
图8 一次改进免疫遗传算法收敛代数数据分布
仿真30次平均收敛代数是27.333 3,最小是9,最大是58。仿真30次平均适应度函数值平均是0.624 5,最小为0.599 3,最大为0.638 9,两者分别与平均值相差4.035 2%和2.305 8%;30次仿真平均获得最佳适应度函数值是0.654 5,最小值0.636 1,最大值0.669 5,两者分别与平均值相差2.811 3%、2.291 8%,由仿真数据可知改进免疫遗传算法可以使雷达组网威力探测最大空间效能更大,并且将图7和图8分别与图5和图6进行比较,仿真30次取得的平均和最佳适应度函数值更平稳,说明改进免疫遗传算法雷达组网优化部署效果更好更稳定,但是收敛速度并没有比免疫遗传算法快,因此还需在改进免疫遗传算法基础上再次改进。
另外在免疫遗传算法对抗体的选择过程中是利用繁殖概率选择,在使用适应度比例方法选择算子时可能出现如下问题:
(1) 算法初始,抗体种群大概率有很多繁殖概率大的抗体,进行适应度比例方法选择以后,大概率选中繁殖概率大的抗体甚至多次选中,会降低种群多样性,产生局部解的问题。
(2) 算法快中止,种群剩下的大概率都是繁殖概率大的抗体,它们之间互相相似,对于抗体种群选择来说,利用适应度比例方法随机生成0到1的数无法产生应有的作用,适应度比例方法的优势不再存在。
因此对改进免疫遗传算法再次改进,按照抗体期望繁殖概率从大到小排序将种群4等分,记作A、B、C、D,将期望繁殖概率最小的D从种群去除,复制A,生成新的抗体种群A、A、B、C,这样直接将期望繁殖概率低的抗体从种群中去除,使它们不能参与算法迭代,使算法收敛速度变快、时间代价变小。另外繁殖概率较低的C,种群多样性也得到保证,避免无法获得全局最优解。利用这样按照繁殖概率人为干涉排序,人为按照繁殖概率选取抗体,这样适应度比例方法后期没有办法区别抗体好坏的问题也得到解决。
对算法仿真30次,图9是仿真30次的平均和最佳适应度函数值分布。图10为30次仿真实验每次实验适应度函数收敛时的迭代次数数值。

图9 二次改进免疫遗传算法适应度函数值数据分布

图10 二次改进免疫遗传算法收敛代数数据分布
对比一次改进算法仿真结果,二次改进算法仿真结果函数曲线平稳,算法更稳定,适应度函数值相对一次改进免疫遗传算法再次增加,雷达组网威力探测最大空间效能再次提升。
对仿真30次得到的数据求均值并进行分析,仿真30次平均收敛代数是17.233 3,收敛代数最小是6,最大43。仿真30次平均适应度函数值平均0.626 0,最小0.610 8,最大0.639 9,两者与平均值相差2.428 1%和2.220 4%;30次仿真平均最佳适应度函数值是0.655 2,最小0.635 5,最大0.674 1,两者和平均值相差3.006 7%、2.884 6%。
将免疫遗传算法、一次改进免疫遗传算法和二次改进免疫遗传算法得到的仿真实验结果进行对比,如表3和表4所示。

表3 三种免疫遗传算法平均适应度函数值比较
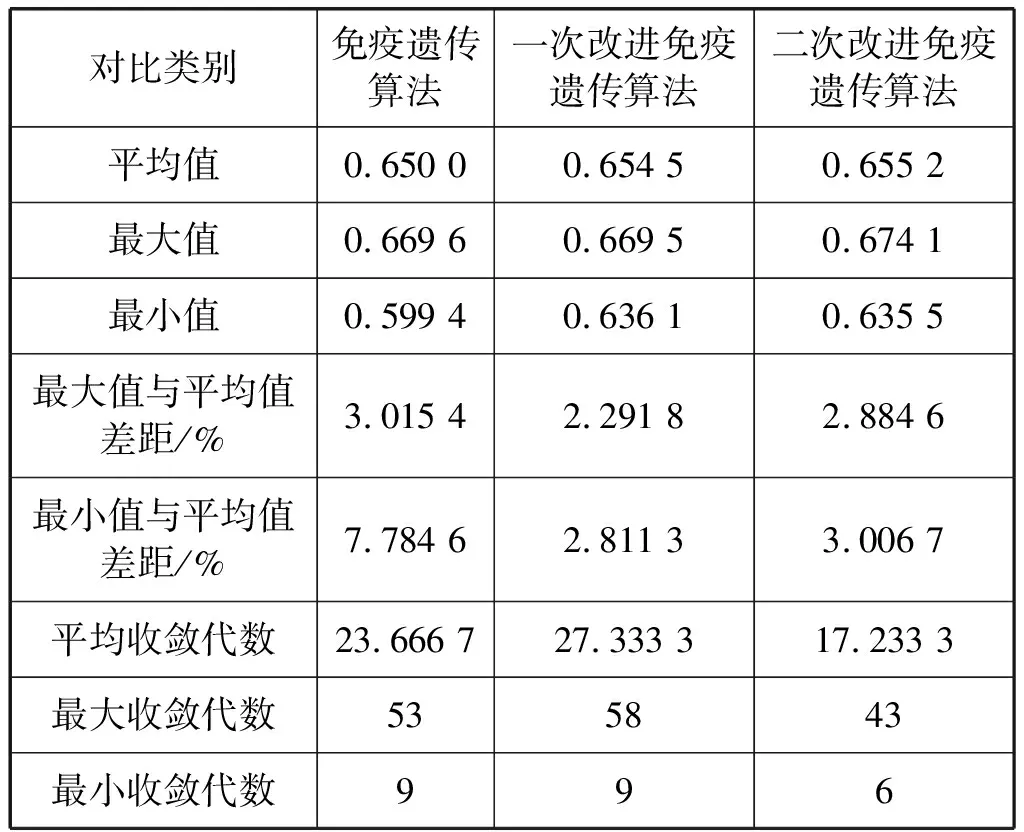
表4 三种免疫遗传算法最佳适应度函数值比较
可以看出,对比免疫遗传算法和一次改进免疫遗传算法,二次改进免疫遗传算法可以经过较少的收敛代数求得适应度函数值更大的解,仿真30次得到的平均和最佳适应度函数值函数分布图曲线平稳,充分说明算法优越的稳定性,实现运行一次程序就可以得到最优的雷达组网的部署方案,算法收敛速度更快,时间代价更小,二次免疫遗传算法可以成为雷达组网优化布站算法,并真正应用于实际战场及工程项目之中。
本文建立针对任务区域保障的雷达组网优化部署模型,并分别采用传统遗传算法和免疫遗传算法对其进行仿真实验,发现传统遗传算法存在早熟、结果不稳定、计算速度慢等问题,免疫遗传算法与之相比,拥有更少的迭代次数,花费更少的时间代价就可以获得收敛的结果,另外拥有更大的最佳适应度函数值,但其仍然存在局部最优、群体多样性差等问题。因此针对免疫遗传算法进行两次改进,通过仿真实验证明,相对免疫遗传算法和一次改进免疫遗传算法,二次改进免疫遗传算法拥有最快的算法收敛速度,算法稳定性最高,满足运行一次程序就可以获得最优的雷达组网部署方案,且可以将雷达组网威力探测空间效能最大化,将该算法最终作为雷达组网优化布站的算法。
猜你喜欢适应度遗传算法种群改进的自适应复制、交叉和突变遗传算法计算机仿真(2022年8期)2022-09-28山西省发现刺五加种群分布今日农业(2022年15期)2022-09-20中华蜂种群急剧萎缩的生态人类学探讨红土地(2018年7期)2018-09-26基于自适应遗传算法的CSAMT一维反演石油地球物理勘探(2017年2期)2017-11-23一种基于遗传算法的聚类分析方法在DNA序列比较中的应用中央民族大学学报(自然科学版)(2017年1期)2017-06-11基于遗传算法和LS-SVM的财务危机预测统计与决策(2017年2期)2017-03-20基于空调导风板成型工艺的Kriging模型适应度研究中国塑料(2016年11期)2016-04-16基于改进的遗传算法的模糊聚类算法智能系统学报(2015年4期)2015-12-27岗更湖鲤鱼的种群特征当代畜禽养殖业(2014年10期)2014-02-27少数民族大学生文化适应度调查教育与职业(2014年16期)2014-01-19